PVT
The PVT block is the last one in the GNSS-SDR flow graph. Hence, it acts as a signal sink, since the stream of data flowing along the receiver ends here.
The role of a PVT block is to compute navigation solutions and deliver information in adequate formats for further processing or data representation.
It follows a description of the available positioning algorithms and their parameters, the available output formats, and the description of the configuration options for this block.
Positioning modes
The positioning problem is generally stated as
\[\begin{equation} \mathbf{y} = \mathbf{h}(\mathbf{x}) + \mathbf{n}~, \end{equation}\]where \(\mathbf{y}\) is the measurement vector (that is, the observables
obtained from the GNSS signals of a set of \(m\) satellites), \(\mathbf{x}\)
is the state vector to be estimated (at least, the position of the receiver’s
antenna and the time), \(\mathbf{h}(\cdot)\) is the function that relates
states with measurements, and \(\mathbf{n}\) models measurement noise.
Depending on the models, assumptions, available measurements, and the
availability of a priori or externally-provided information, many positioning
strategies and algorithms can be devised. It follows a description of the
positioning modes available at the RTKLIB_PVT
implementation, mostly extracted from the excellent RTKLIB
manual.
Single Point Positioning
The default positioning mode is PVT.positioning_mode=Single. In this mode, the
vector of unknown states is defined as:
where \(\mathbf{r}_r\) is the receiver’s antenna position in an earth-centered, earth-fixed (ECEF) coordinate system (in meters), \(c\) is the speed of light, and \(dt_r\) is the receiver clock bias (in seconds).
The measurement vector is defi
\[\begin{equation} \mathbf{y} = \left(P_r^{(1)}, P_r^{(2)}, P_r^{(3)}, ..., P_r^{(m)} \right)^T~. \end{equation}\]As described in the Observables block, for a signal from satellite \(s\) in the i-th band, the pseudorange measurement \(P_{r,i}^{(s)}\) can be expressed as:
\[\begin{equation} P_{r,i}^{(s)} = \rho_r^{(s)} + c\left(dt_r(t_r) - dT^{(s)}(t^{(s)}) \right) + I_{r,i}^{(s)} + T_r^{(s)} + \epsilon_P~. \end{equation}\]In the current implementation, if the receiver obtains pseudorange measurements from the same satellite in different frequency bands, only measurements in the L1 band are used.
Hence, the equation that relates pseudorange measurements to the vector of unknown states can be written as:
\[\begin{equation} \mathbf{h}(\mathbf{x}) = \left( \begin{array}{c} \rho_{r}^{(1)} + c \cdot dt_r - c \cdot dT^{(1)} + I_{r}^{(1)} + T_{r}^{(1)} \\ \rho_{r}^{(2)} + c \cdot dt_r - c \cdot dT^{(2)} + I_{r}^{(2)} + T_{r}^{(2)} \\ \rho_{r}^{(3)} + c \cdot dt_r - c \cdot dT^{(3)} + I_{r}^{(3)} + T_{r}^{(3)} \\ \vdots \\ \rho_{r}^{(m)} + c \cdot dt_r - c \cdot dT^{(m)} + I_{r}^{(m)} + T_{r}^{(m)} \end{array} \right)~. \end{equation}\]The geometric range \(\rho_r^{(s)}\) is defined as the physical distance between the satellite antenna phase center position and the receiver antenna phase center position in the inertial coordinates. For the expression in the ECEF coordinates, the earth rotation effect has to be incorporated. This is known as the Sagnac effect1, and it can be approximated by:
\(\begin{equation} \rho_{r}^{(s)} \approx \left\| \mathbf{r}_r(t_r) - \mathbf{r}^{(s)}(t^{(s)}) \right\| + {\definecolor{dark-orange}{RGB}{255,165,0} \color{dark-orange} \frac{\omega_e}{c}\left(x^{(s)}y_r - y^{(s)}x_r \right)}~, \end{equation}\) where \(\omega_e\) is the Earth rotation angle velocity (in rad/s).
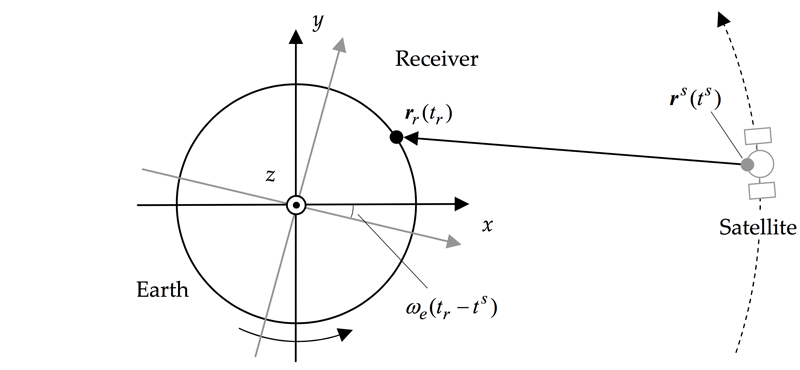 Geometric range and Earth rotation correction 2
Geometric range and Earth rotation correction 2
Equation \(\mathbf{h}(\mathbf{x})\) is clearly nonlinear due to the presence of the Euclidean norm operator \(\left\| \cdot \right\|\). However, this term can be extended by using Taylor series around an initial parameter vector \(\mathbf{x}_0\) as \(\mathbf{h}(\mathbf{x}) = \mathbf{h}(\mathbf{x}_0) + \mathbf{H}(\mathbf{x}-\mathbf{x}_0) + ...\), where \(\mathbf{H} = \frac{\partial \mathbf{h}(\mathbf{x})}{\partial \mathbf{x}} \bigg\rvert_{\mathbf{x} = \mathbf{x}_{0} }\) is a partial derivatives matrix of \(\mathbf{h}(\mathbf{x})\) with respect to \(\mathbf{x}\) at \(\mathbf{x} = \mathbf{x}_{0}\). Assuming that the initial parameters are adequately near the true values and the second and further terms of the Taylor series can be neglected, equation \(\mathbf{y} = \mathbf{h}(\mathbf{x}) + \mathbf{n}\) can be approximated by \(\mathbf{y} \approx \mathbf{h}(\mathbf{x}_0) + \mathbf{H}(\mathbf{x}-\mathbf{x}_0) + \mathbf{n}\), and then we can obtain the following linear equation:
\[\begin{equation} \mathbf{y} - \mathbf{h}(\mathbf{x}_0) = \mathbf{H}(\mathbf{x}-\mathbf{x}_0) + \mathbf{n}~, \end{equation}\]which can be solved by a standard iterative weighted least squares method.
Matrix \(\mathbf{H}\) can be written as:
\[\begin{equation} \label{eq:H-single} \mathbf{H} = \left( \begin{array}{cc} - {\mathbf{e}_{r}^{(1)}}^T & 1 \\ -{\mathbf{e}_{r}^{(2)}}^T & 1 \\ -{\mathbf{e}_{r}^{(3)}}^T & 1 \\ \vdots & \vdots \\ -{\mathbf{e}_{r}^{(m)}}^T & 1 \end{array} \right), \quad \text{where } \mathbf{e}_r^{(s)} = \frac{\mathbf{r}^{(s)}(t^{(s)}) - \mathbf{r}_r(t_r) }{\left\| \mathbf{r}^{(s)}(t^{(s)}) - \mathbf{r}_r(t_r) \right\|} \end{equation}\]and the weighted least squares estimator (LSE) of the unknown state vector is obtained as:
For the initial parameter vector \(\mathbf{x}_0\) for the iterated weighted
LSE, just all \(0\) are used for the first epoch of the single point
positioning. Once a solution obtained, the position is used for the next epoch
initial receiver position. For the weight matrix \(\mathbf{W}\), the
RTKLIB_PVT implementation uses:
where:
-
\(F^{(s)}\) is the satellite system error factor. This parameter is set to \(F^{(s)} = 1\) for GPS and Galileo.
-
\(R_r\) is the code/carrier‐phase error ratio. This value is set by default to \(R_r = 100\), and can be configured with the
PVT.code_phase_error_ratio_l1option. -
\(a_{\sigma}, b_{\sigma}\) is the carrier‐phase error factor \(a\) and \(b\) (in m). They are set by default to \(a_{\sigma} = b_{\sigma} = 0.003\) m, and can be configured with the
PVT.carrier_phase_error_factor_aandPVT.carrier_phase_error_factor_boptions, respectively. -
\(El_r^{(s)}\) is the elevation angle of satellite direction (in rad).
-
\(\sigma_{bclock,s}\) is the standard deviation of the broadcast ephemeris and clock error (in m). This parameter is estimated internally from URA (User Range Accuracy) or or similar indicators.
-
\(\sigma_{ion,s}\) is the standard deviation of ionosphere correction model error (in m). This parameter is set to \(\sigma_{ion} = 5\) m by default (
PVT.iono_model=OFF) and \(\sigma_{ion} = 0.5 \cdot I_{r,i}^{(s)}\) m when the optionPVT.iono_model=Broadcastis set in the configuration file. -
\(\sigma_{trop,s}\) is the standard deviation of troposphere correction model error (in m). This parameter is set to \(\sigma_{trop} = 3\) m by default (
PVT.trop_model=OFF) and \(\sigma_{trop} = 0.3 / \left(\sin(El_r^{(s)}) + 0.1\right)\) m when the optionPVT.trop_model=Saastamoinen,PVT.trop_model=Estimate_ZTDorPVT.trop_model=Estimate_ZTD_Gradis set in the configuration file. -
\(\sigma_{cbias}\) is the standard deviation of code bias error (in m). This parameter is set to \(\sigma_{cbias} = 0.3\) m.
The estimated receiver clock bias \(dt_r\) is not explicitly output, but incorporated in the solution time‐tag. That means the solution time‐tag indicates not the receiver time‐tag but the true signal reception time measured in GPS Time.
Solution validation
The estimated receiver positions described in (\(\ref{eq:lse}\)) might include
invalid solutions due to unmodeled measurement errors. To test whether the
solution is valid or not, and to reject the invalid solutions, the RTKLIB_PVT
applies the following validation tests after obtaining the receiver’s position
estimate:
1) Residuals Test
Defining the residuals vector \(\boldsymbol{\nu} = \left( \nu_1, \nu_2, \nu_3, ..., \nu_m \right)^T\) with:
\[\nu_s = \frac{P_r^{(s)} - \left( \hat{\rho}_r^{(s)} + c \hat{dt}_r - c \cdot dT^{(s)} + I_r^{(s)} + T_r^{(s)} \right)}{\sigma_s}~,\]the residuals test is defined as:
\[\frac{\boldsymbol{\nu}^T \boldsymbol{\nu}}{m-n-1} < \chi_{\alpha}^2 (m-n-1)\]where \(n\) is the number of estimated parameters, \(m\) is the number of measurements, \(\chi_{\alpha}^2(n)\) is the chi‐square distribution of degree of freedom \(n\), and with a significance level of \(\alpha=0.001\) (that is, \(prob > 0.001\)).
2) GDOP Test
The Geometric Dilution of Precision, defined as \(\text{GDOP} = \sqrt{\sigma_{r_{x}}^2 + \sigma_{r_{y}}^2 + \sigma_{r_{z}}^2 + \sigma_{c \cdot dt}^2 }\), must be better (that is, lower) than a certain threshold:
\[\text{GDOP} < \text{GDOP}_{\text{threshold}}\]The threshold value is set by default to \(\text{GDOP}_{\text{threshold}} =
30\), and it can be configured via the option PVT.threshold_reject_GDOP in the
configuration file.
If any of the validation fails, the solution is rejected as an outlier (that is, no solution is provided).
Receiver Autonomous Integrity Monitoring (RAIM)
In addition to the solution validation described above, RAIM (receiver
autonomous integrity monitoring) FDE (fault detection and exclusion) function
can be activated. If the chi-squared test described above fails and the option
PVT.raim_fde is set to \(1\), the implementation retries the estimation by
excluding one by one of the visible satellites. After all of the retries, the
estimated receiver position with the minimum normalized squared residuals
\(\boldsymbol{\nu}^T \boldsymbol{\nu}\) is selected as the final solution. In
such a scheme, an invalid measurement, which might be due to satellite
malfunction, receiver fault, or large multipath, is excluded as an outlier. Note
that this feature is not effective with two or more invalid measurements. It
also needs two redundant visible satellites, which means at least 6 visible
satellites are necessary to obtain the final solution.
Precise Point Positioning
When the PVT.positioning_mode option is set to PPP_Static or PPP_Kinematic
in the configuration file, a Precise Point Positioning algorithm is used to
solve the positioning problem. In this positioning mode, the state vector to be
estimated is defined as:
where \(Z_r\) is ZTD (zenith total delay), \(G_{N_r}\) and \(G_{E_r}\) are the north and east components of tropospheric gradients (see the tropospheric model below) and \(\mathbf{B}_{LC} = \left( B_{r,LC}^{(1)}, B_{r,LC}^{(2)}, B_{r,LC}^{(3)}, ..., B_{r,LC}^{(m)} \right)^T\) is the ionosphere‐free linear combination of zero‐differenced carrier‐phase biases (in m), defined below in Equation (\(\ref{eq:bias-lc}\)).
The Precise Point Positioning measurement model is based on the fact that, according to the phase and code ionospheric refraction, the first order ionospheric effects on code and carrier-phase measurements depend (99.9 %) on the inverse of squared signal frequency \(f_i\). Thence, dual-frequency receivers can eliminate their effect through a linear combination of pseudorange \(P_{r,i}^{(s)}\) and phase-range \(\Phi_{r,i}^{(s)}\) measurements (where the definitions at Observables apply):
\[P_{r,LC}^{(s)} = C_i P_{r,i}^{(s)} + C_j P_{r,j}^{(s)}\] \[\Phi_{r,LC}^{(s)} = C_i \Phi_{r,i}^{(s)} + C_j \Phi_{r,j}^{(s)}\]with \(C_i = \frac{f_i^2}{f_i^2 - f_j^2}\) and \(C_j = \frac{-f_j^2}{f_i^2 - f_j^2}\), where \(f_i\) and \(f_j\) are the frequencies (in Hz) of \(L_i\) and \(L_j\) measurements. Explicitly:
\[\begin{equation} P_{r,LC}^{(s)} = \rho_{r}^{(s)} + c\left(dt_r - dT^{(s)}\right) + T_{r}^{(s)} + \epsilon_P \end{equation}\] \[\begin{equation} \Phi_{r,LC}^{(s)} = \rho_{r}^{(s)} + c\left(dt_r - dT^{(s)}\right) + T_{r}^{(s)} + B_{r,LC}^{(s)} + d\Phi_{r,LC}^{(s)} + \epsilon_{\Phi} \end{equation}\]with
\[\begin{equation} \label{eq:bias-lc} B_{r,LC}^{(s)} = C_i \left( \phi_{r,0,i} - \phi_{0,i}^{(s)} + N_{r,i}^{(s)} \right) + C_j \left( \phi_{r,0,j} - \phi_{0,j}^{(s)} + N_{r,j}^{(s)} \right) \end{equation}\] \[\begin{equation} \begin{array}{ccl} d\Phi_{r,LC}^{(s)} & = & - \left( C_i \mathbf{d}_{r,pco,i} + C_j C_i \mathbf{d}_{r,pco,i} \right)^T \mathbf{e}_{r,enu}^{(s)} + \\ {} & {} & + \left( \mathbf{E}^{(s)} \left( C_i \mathbf{d}_{pco,i}^{(s)} + C_j\mathbf{d}_{pco,j}^{(s)} \right) \right)^T \mathbf{e}_r^{(s)} + \\ {} & {} & + \left( C_i d_{r,pcv,i}(El_{r}^{(s)}) + C_j d_{r,pcv,j}(El_{r}^{(s)}) \right) + \\ {} & {} & + \left( d_{pcv,i}^{(s)}(\theta) + d_{pcv,j}^{(s)}(\theta)\right) + \\ {} & {} & - \mathbf{d}_{r,disp}^T \mathbf{e}_{r,enu}^{(s)} +\left( C_i\lambda_i + C_j \lambda_j \right) \phi_{pw} \end{array} \end{equation}\]In the current implementation, satellites and receiver antennas offset and
variation are not applied, so \(\mathbf{d}_{r,pco,i} = \mathbf{d}_{pco,i}^{(s)} =
\mathbf{0}\) and \(d_{r,pcv,i} = d_{pcv,j}^{(s)} = 0\). The correction terms
for the Earth tide3 \(\mathbf{d}_{r,disp}\) and the phase windup
effect4 \(\phi_{pw}\) are deactivated by default, and can be
activated through the PVT.earth_tide and PVT.phwindup options, respectively.
The measurement vector is then defined as:
\[\begin{equation} \mathbf{y} = \left( \boldsymbol{\Phi}_{LC}^T, \mathbf{P}_{LC}^T \right)^T~, \end{equation}\]where \(\boldsymbol{\Phi}_{LC} = \left(\Phi_{r,LC}^{(1)}, \Phi_{r,LC}^{(2)}, \Phi_{r,LC}^{(3)}, ..., \Phi_{r,LC}^{(m)} \right)^T\) and \(\mathbf{P}_{LC} = \left( P_{r,LC}^{(1)}, P_{r,LC}^{(2)}, P_{r,LC}^{(3)}, ..., P_{r,LC}^{(m)} \right)^T\).
In the current implementation, if the receiver obtains pseudorange measurements from the same satellite in different frequency bands, only measurements in the L1 band are used.
The equation \(\mathbf{h}(\mathbf{x})\) that relates measurements and states is:
\[\begin{equation} \mathbf{h}(\mathbf{x}) = \left( \mathbf{h}_{\Phi}^T, \mathbf{h}_{P}^T \right)^T~, \end{equation}\]where:
\[\mathbf{h}_{\Phi} = \left( \begin{array}{c} \rho_{r}^{(1)} + c(dt_r - dT^{(1)}) + T_{r}^{(1)} + B_{r,LC}^{(1)} + d\Phi_{r,LC}^{(1)} \\ \rho_{r}^{(2)} + c(dt_r - dT^{(2)}) + T_{r}^{(2)} + B_{r,LC}^{(2)} + d\Phi_{r,LC}^{(2)} \\ \rho_{r}^{(3)} + c(dt_r - dT^{(3)}) + T_{r}^{(3)} + B_{r,LC}^{(3)} + d\Phi_{r,LC}^{(3)} \\ \vdots \\ \rho_{r}^{(m)} + c(dt_r - dT^{(m)}) + T_{r}^{(m)} + B_{r,LC}^{(m)} + d\Phi_{r,LC}^{(m)} \end{array}\right)~,\] \[\mathbf{h}_{P} = \left( \begin{array}{c} \rho_{r}^{(1)} + c(dt_r - dT^{(1)}) + T_{r}^{(1)} \\ \rho_{r}^{(2)} + c(dt_r - dT^{(2)}) + T_{r}^{(2)} \\ \rho_{r}^{(3)} + c(dt_r - dT^{(3)}) + T_{r}^{(3)} \\ \vdots \\ \rho_{r}^{(m)} + c(dt_r - dT^{(m)}) + T_{r}^{(m)} \end{array}\right)~.\]This is again a nonlinear equation that could be solved with the iterative weighted least squares estimator as in the case of the Single Point Positioning case. However, here we want to incorporate some a priori information, such as a basic dynamic model for the receiver, and some statistical knowledge about the status of the troposphere. The Extended Kalman Filter offers a suitable framework for that.
The partial derivatives matrix \(\mathbf{H} = \frac{\partial \mathbf{h}(\mathbf{x})}{\partial \mathbf{x}} \bigg\rvert_{\mathbf{x} = \mathbf{x}_{0} }\) can be written as:
\[\begin{equation} \mathbf{H}(\mathbf{x}) = \left(\begin{array}{ccccc} - \mathbf{DE} & \mathbf{0} & \mathbf{1} & \mathbf{DM}_T && \mathbf{I} \\ -\mathbf{DE} & \mathbf{0} & \mathbf{1} & \mathbf{DM}_T && \mathbf{0} \end{array} \right)~, \end{equation}\]where \(\mathbf{D} = \left( \begin{array}{ccccc} 1 & -1 & 0 & \cdots & 0 \\ 1 & 0 & -1 & \cdots & 0 \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ 1 & 0 & 0 & \cdots & -1 \end{array} \right)\) is known as the single‐differencing matrix, \(\mathbf{E} = \left( \mathbf{e}_{r}^{(1)}, \mathbf{e}_{r}^{(2)}, \mathbf{e}_{r}^{(3)}, ..., \mathbf{e}_{r}^{(m)} \right)^T\) with \(\mathbf{e}_{r}^{(s)}\) defined as in equation (\(\ref{eq:H-single}\)), and
\(\scriptstyle \begin{equation} \!\!\!\!\!\!\!\!\!\!\! \mathbf{M}_T \; = \; \left( \begin{array}{ccc} m_{WG,r}^{(1)} \left( El_r^{(1)} \right) & m_{W,r}^{(1)} \left( El_r^{(1)} \right) \cot \left( El_r^{(1)} \right) \cos \left( Az_r^{(1)} \right) & m_{W,r}^{(1)} \left( El_r^{(1)} \right) \cot \left( El_r^{(1)} \right) \sin \left( Az_r^{(1)} \right) \\ m_{WG,r}^{(2)} \left( El_r^{(2)} \right) & m_{W,r}^{(2)} \left( El_r^{(2)} \right) \cot \left( El_r^{(2)} \right) \cos \left( Az_r^{(2)} \right) & m_{W,r}^{(2)} \left( El_r^{(2)} \right) \cot \left( El_r^{(2)} \right) \sin \left( Az_r^{(2)} \right) \\ m_{WG,r}^{(3)} \left( El_r^{(3)} \right) & m_{W,r}^{(3)} \left( El_r^{(3)} \right) \cot \left( El_r^{(3)} \right) \cos \left( Az_r^{(3)} \right) & m_{W,r}^{(3)} \left( El_r^{(3)} \right) \cot \left( El_r^{(3)} \right) \sin \left( Az_r^{(3)} \right) \\ \vdots \\ m_{WG,r}^{(m)} \left( El_r^{(m)} \right) & m_{W,r}^{(m)} \left( El_r^{(m)} \right) \cot \left( El_r^{(m)} \right) \cos \left( Az_r^{(m)} \right) & m_{W,r}^{(m)} \left( El_r^{(m)} \right) \cot \left( El_r^{(m)} \right) \sin \left( Az_r^{(m)} \right) \end{array} \right) \end{equation}\) is a matrix related to the tropospheric model (see below).
With all those definitions, the Precise Point Positioning solution is computed as follows:
- Time update (prediction):
- Measurement update (estimation):
The transition matrix \(\mathbf{F}_k\) models the receiver movement:
- If
PVT.positioning_mode=PPP_Static:
- If
PVT.positioning_mode=PPP_Kinematic:
where \(\Delta_k = t_{k+1} - t_k\) is the time between GNSS measurements, in s.
The dynamics model noise covariance matrix \(\mathbf{Q}_k\) is set to:
\[\begin{equation} \mathbf{Q}_k = \left(\begin{array}{ccccc} \mathbf{Q}_{r} & {} & {} & {} & {} \\ {} & \mathbf{Q}_{v} & {} & {} & {} \\ {} & {} & \sigma_{c \cdot dt_{r}}^2 & {} & {} \\ {} & {} & {} & \mathbf{Q}_{T} & {} \\ {} & {} & {} & {} & \sigma_{bias}^2 \Delta_k \mathbf{I}_{m\times m} \end{array} \right) \end{equation}\]with:
- \(\mathbf{Q}_r = \mathbf{E}_r^T \text{diag} \left( \sigma_{re}^2 ,
\sigma_{rn}^2 , \sigma_{ru}^2 \right) \mathbf{E}_r\), where \(\mathbf{E}_r\) is the coordinates rotation matrix from ECEF to local
coordinates at the receiver antenna position (defined below), and
\(\sigma_{re}\), \(\sigma_{rn}\) and \(\sigma_{ru}\) are the standard
deviations of east, north, and up components of the receiver position model
noises (in m).
- If the positioning mode is set to
PVT.positioning_mode=PPP_Static, these values are initialized to \(\sigma_{re} = \sigma_{rn} = \sigma_{ru} = 100\) m in the first epoch and then set to \(0\) in the following time updates. - If the positioning mode is set to
PVT.positioning_mode=PPP_Kinematic, these values are set to \(\sigma_{re} = \sigma_{rn} = \sigma_{ru} = 100\) m for all time updates.
- If the positioning mode is set to
- \(\mathbf{Q}_v = \mathbf{E}_r^T \text{diag} \left( \sigma_{ve}^2 \Delta_k , \sigma_{vn}^2 \Delta_k, \sigma_{vu}^2 \Delta_k \right) \mathbf{E}_r\), where \(\sigma_{ve}\), \(\sigma_{vn}\) and \(\sigma_{vu}\) are the standard deviations of east, north, and up components of the receiver velocity model noises (in m/s/\(\sqrt{s}\)). In the current implementation, those parameters are set to \(\sigma_{ve} = \sigma_{vn} = \sigma_{vu} = 0\).
- \(\sigma_{c \cdot dt_{r}}\) is the standard deviation of the receiver clock offset (in m). This value is set to \(\sigma_{c \cdot dt_{r}} = 100\) m.
- \(\mathbf{Q}_{T} = \text{diag} \left( \sigma_{Z}^2 \Delta_k,
\sigma_{G_{N}}^2 \Delta_k, \sigma_{G_{E}}^2 \Delta_k \right)\) is the noise
covariance matrix of the troposphere terms. These values are set to \(\sigma_{Z} = 0.0001\), and \(\sigma_{G_{N}} = \sigma_{G_{E}}\) are
initialized to \(\sigma_{G_{N}} = \sigma_{G_{E}} = 0.001\) m/\(\sqrt{s}\)
in the first epoch and then set to \(\sigma_{G_{N}} = \sigma_{G_{E}} = 0.1
\cdot \sigma_{Z}\) in the following time updates. The default value of \(\sigma_{Z} = 0.0001\) m/\(\sqrt{s}\) can be configured with the
PVT.sigma_tropoption. - \(\sigma_{bias}\) is the standard deviation of the ionosphere-free
carrier-phase bias measurements, in m/\(\sqrt{s}\). This value is
initialized at the first epoch and after a cycle slip to \(\sigma_{bias} =
100\) m/\(\sqrt{s}\), and then is set to a default value of \(\sigma_{bias} = 0.0001\) m/\(\sqrt{s}\) in the following time updates.
This value and can be configured with the option
PVT.sigma_bias. - \(\mathbf{E}_r = \left( \begin{array}{ccc} - \sin(\theta_r) & \cos (\theta_r) & 0 \\ -\sin (\psi_r) \cos(\theta_r) & - \sin (\psi_r)\sin(\theta_r) & \cos (\psi_r) \\ \cos(\psi_r)\cos(\theta_r) & \cos(\psi_r)\sin(\theta_r) & \sin(\psi_r)\end{array} \right)\) is the rotation matrix of the ECEF coordinates to the local coordinates, where \(\psi_r\) and \(\theta_r\) are the geodetic latitude and the longitude of the receiver position.
The measurement model noise covariance matrix \(\mathbf{R}_k\) is defined as:
\[\begin{equation} \mathbf{R} = \left( \begin{array}{cc} \mathbf{R}_{\Phi,LC} & \mathbf{0} \\ \mathbf{0} & \mathbf{R}_{P,LC} \end{array}\right)~, \end{equation}\]where:
\[\mathbf{R}_{\Phi,LC} = \text{diag} \left( {\sigma_{\Phi,1}^{(1)}}^2, {\sigma_{\Phi,1}^{(2)}}^2, {\sigma_{\Phi,1}^{(3)}}^2, ..., {\sigma_{\Phi,1}^{(m)}}^2 \right)~,\] \[\mathbf{R}_{P,LC} = \text{diag} \left( {\sigma_{P,1}^{(1)}}^2, {\sigma_{P,1}^{(2)}}^2, {\sigma_{P,1}^{(3)}}^2, ..., {\sigma_{P,1}^{(m)}}^2 \right)~,\]in which \(\sigma_{\Phi,1}^{(s)}\) is the standard deviation of L1 phase‐range measurement error (in m), and \(\sigma_{P,1}^{(s)}\) is the standard deviation of L1 pseudorange measurement error (in m). These quantities are estimated as:
- \({\sigma_{\Phi,1}^{(s)}}^2 = a_{\sigma}^2 + \frac{b_{\sigma}^2}{\sin(E_r^{(s)})^2} + \sigma_{ion,s}^2 + \sigma_{bclock}^2 + \sigma_{trop,s}^2\), where:
- \(a_{\sigma} = 0.003\) and \(b_{\sigma} = 0.003\) are the carrier
phase error factors (configurable via
PVT.carrier_phase_error_factor_aandPVT.carrier_phase_error_factor_b), - \(\sigma_{ion,s}\) is the standard deviation of ionosphere correction
model error (in m). This parameter is set to \(\sigma_{ion} = 5\) m by
default (
PVT.iono_model=OFF) and \(\sigma_{ion} = 0.5 \cdot I_{r,i}^{(s)}\) m when the optionPVT.iono_model=Broadcastis set in the configuration file. - \(\sigma_{bclock} = 30\) m is the standard deviation of the broadcast clock,
- \(\sigma_{trop}\) is the standard deviation of the troposphere
correction model error (in m). This parameter is set to \(\sigma_{trop} = 3\)
m when
PVT.trop_model=OFFand \(\sigma_{trop,s} = \frac{0.3}{\sin(El_r^{(s)}) + 0.1}\) m whenPVT.trop_model=Saastamoinen,PVT.trop_model=Estimate_ZTDorPVT.trop_model=Estimate_ZTD_Grad.
- \(a_{\sigma} = 0.003\) and \(b_{\sigma} = 0.003\) are the carrier
phase error factors (configurable via
- \({\sigma_{P,1}^{(s)}}^2 = R_r \cdot \left( a_{\sigma}^2 + \frac{b_{\sigma}^2}{\sin(E_r^{(s)})^2} \right) + \sigma_{ion,s}^2 + \sigma_{bclock}^2 + \sigma_{trop,s}^2 + \sigma_{cbias}^2\), where:
- \(R_r = 100\) (configurable via
PVT.code_phase_error_ratio_l1), - \(a_{\sigma} = b_{\sigma} = 0.003\) m (configurable via
PVT.carrier_phase_error_factor_aandPVT.carrier_phase_error_factor_b), - \(\sigma_{ion,s}\), \(\sigma_{bclock}\) and \(\sigma_{trop,s}\) defined as above.
- \(\sigma_{cbias}\) is the standard deviation of code bias error (in m). This parameter is set to \(\sigma_{cbias} = 0.3\) m.
- \(R_r = 100\) (configurable via
Outlier rejection
In each of the executions of the Extended Kalman Filter defined in (\(\ref{eq:state-update}\))-(\(\ref{eq:meas-cov-update}\)), if the absolute
value of a residual \(\nu_s = \frac{P_r^{(s)} - \left( \hat{\rho}_r^{(s)} +c
\hat{dt}_r - c \cdot dT^{(s)} + I_r^{(s)} + T_r^{(s)} \right)}{\sigma_s}\) for a
satellite \(s\) is above a certain threshold, that observation is rejected as
an outlier. The default threshold is set to \(30\) m and can be configured via
the option PVT.threshold_reject_innovation.
Ionospheric Model
The ionosphere is a region of Earth’s upper atmosphere, from about 60 km to 1,000 km altitude, surrounding the planet with a shell of electrons and electrically charged atoms and molecules. This part of the atmosphere is ionized by ultraviolet, X-ray and shorter wavelengths of solar radiation, and this affects GNSS signals’ propagation speed.
The propagation speed of the GNSS electromagnetic signals through the ionosphere depends on its electron density, which is typically driven by two main processes: during the day, sun radiation causes ionization of neutral atoms producing free electrons and ions. During the night, the recombination process prevails, where free electrons are recombined with ions to produce neutral particles, which leads to a reduction in the electron density.
The frequency dependence of the ionospheric effect (in m) is described by the following expression:
\[\begin{equation} I_{r,i}^{(s)} = \frac{40.3 \cdot \text{STEC} }{f_i^2}~, \end{equation}\]where STEC is the Slant Total Electron Content, which describes the number of free electrons present within one square meter between the receiver and satellite \(s\). It is often reported in multiples of the so-called TEC unit, defined as \(\text{TECU} = 10^{16}\) el/m\(^2\). Ionospheric effects on the phase and code measurements have the opposite signs and have approximately the same amount. It causes a positive delay on code measurements (so it is included with a positive sign in the pseudorange measurement model) and a negative delay, or phase advance, in phase measurements (so it is included with a negative sign in the phase-range measurement model).
This dispersive nature (i.e., the ionospheric delay is proportional to the squared inverse of \(f_i\)) allows users to remove its effect up to more than 99.9% using two frequency measurements (as in the see ionosphere-free combination for dual-frequency receivers shown in the Precise Point Positioning algorithm described above), but single-frequency receivers have to apply an ionospheric prediction model to remove (as much as possible) this effect, that can reach up to several tens of meters.
Broadcast
For ionosphere correction for single-frequency GNSS users, GPS navigation data include the following broadcast ionospheric parameters:
\[\mathbf{p}_{ion} = \left(\alpha_0, \alpha_1, \alpha_2, \alpha_3, \beta_0, \beta_1, \beta_2, \beta_3 \right)^T~.\]By using these ionospheric parameters, the L1 ionospheric delay \(I_{r,1}^{(s)}\) (in m) can be derived by the following procedure5 (this model is often called as the Klobuchar model6):
\[\begin{equation} \Psi = \frac{0.0137}{El_r^{(s)} + 0.11} - 0.022 \end{equation}\] \[\begin{equation} \psi_i = \psi + \Psi \cos\left(Az_r^{(s)}\right) \end{equation}\] \[\begin{equation} \lambda_i = \lambda + \frac{\Psi \sin\left(Az_r^{(s)}\right)}{\cos(\psi_i)} \end{equation}\] \[\begin{equation} \psi_m = \psi_i + 0.064 \cos(\lambda_i - 1.617) \end{equation}\] \[\begin{equation} t = 4.32 \cdot 10^4 \lambda_i + t \end{equation}\] \[\begin{equation} F = 1.0 + 16.0 \cdot \left(0.43 - El_r^{(s)}\right)^3 \end{equation}\] \[\begin{equation} x = \frac{2 \pi (t - 505400)}{\sum_{n=0}^{3} \beta_n {\psi_m}^n} \end{equation}\] \[\begin{equation} \!\!\!\!\!\!\!\!I_{r,1}^{(s)} = \left\{ \begin{array}{cc} F \cdot 5 \cdot 10 ^{-9} & \left(|x| > 1.57\right) \\ F \cdot \left( 5 \cdot 10^{-9} + \sum_{n=1}^{4} \alpha_n {\psi_m}^{n} \cdot \left(1 -\frac{x^2}{2}+\frac{x^4}{24} \right) \right) & ( | x | \leq 1.57)\end{array} \right. \end{equation}\]This correction is activated when PVT.iono_model is set to Broadcast.
Tropospheric Model
The troposphere is the lowest portion of Earth’s atmosphere, and contains 99% of the total mass of water vapor. The average depths of the troposphere are 20 km in the tropics, 17 km in the mid-latitudes, and 7 km in the polar regions in winter. The chemical composition of the troposphere is essentially uniform, with the notable exception of water vapor, which can vary widely. The effect of the troposphere on the GNSS signals appears as an extra delay in the measurement of the signal traveling time from the satellite to the receiver. This delay depends on the temperature, pressure, humidity as well as the transmitter and receiver antennas location, and it is related to air refractivity, which in turn can be divided into hydrostatic, i.e., dry gases (mainly \(N_2\) and \(O_2\)), and wet, i.e., water vapor, components:
-
Hydrostatic component delay: Its effect varies with local temperature and atmospheric pressure in quite a predictable manner, besides its variation is less than the 1% in a few hours. The error caused by this component is about \(2.3\) meters in the zenith direction and \(10\) meters for lower elevations (\(10^{o}\) approximately).
-
Wet component delay: It is caused by the water vapor and condensed water in form of clouds and, thence, it depends on weather conditions. The excess delay is small in this case, only some tens of centimetres, but this component varies faster than the hydrostatic component and in a quite random way, being very difficult to model.
The troposphere is a non-dispersive media with respect to electromagnetic waves up to 15 GHz, so the tropospheric effects are not frequency-dependent for the GNSS signals. Thence, the carrier phase and code measurements are affected by the same delay, and this effect can not be removed by combinations of dual-frequency measurements.
Saastamoinen
The standard atmosphere can be expressed as:7
\[\begin{equation} p = 1013.15 \cdot (1 - 2.2557 \cdot 10^{-5} \cdot h)^{5.2568}~, \end{equation}\] \[\begin{equation} T = 15.0 - 6.5 \cdot 10^{-3} \cdot h + 273.15~, \end{equation}\] \[\begin{equation} e = 6.108 \cdot \exp\left\{\frac{17.15 T - 4684.0}{T - 38.45}\right\} \cdot \frac{h_{rel}}{100}~, \end{equation}\]where \(p\) is the total pressure (in hPa), \(T\) is the absolute temperature (in K) of the air, \(h\) is the geodetic height above MSL (mean sea level), \(e\) is the partial pressure (in hPa) of water vapor and \(h_{rel}\) is the relative humidity. The tropospheric delay \(T_{r}^{(s)}\) (in m) is expressed by the Saastamoinen model with \(p\), \(T\) and \(e\) derived from the standard atmosphere:
\[\begin{equation} T_{r}^{(s)} = \frac{0.002277}{\cos(z^{(s)})} \left\{ p+\left( \frac{1255}{T} + 0.05 \right) e - \tan(z^{(s)})^2 \right\}~, \end{equation}\]where \(z^{(s)}\) is the zenith angle (rad) as \(z^{(s)} = \frac{\pi}{2} - El_{r}^{(s)}\), where \(El_{r}^{(s)}\) is elevation angle of satellite direction (rad).
The standard atmosphere and the Saastamoinen model are applied in the case that
the processing option PVT.trop_model is set to Saastamoinen, where the
geodetic height is approximated by the ellipsoidal height and the relative
humidity is fixed to 70%.
Estimate the tropospheric zenith total delay
If the processing option PVT.trop_model is set to Estimate_ZTD, a more
precise troposphere model is applied with strict mapping functions as:
where \(Z_{T,t}\) is the tropospheric zenith total delay (in meters), \(Z_{H,r}\) is the tropospheric zenith hydro‐static delay (in meters), \(m_{H}\left(El_{r}^{(s)}\right)\) is the hydro‐static mapping function and \(m_{W}\left(El_{r}^{(s)}\right)\) is the wet mapping function. The tropospheric zenith hydro‐static delay is given by Saastamoinen model described above with the zenith angle \(z = 0\) and relative humidity \(h_{rel} = 0\). For the mapping function, the software employs the Niell mapping function8. The zenith total delay \(Z_{T,r}\) is estimated as an unknown parameter in the parameter estimation process.
Estimate the tropospheric zenith total delay and gradient
If the processing option trop_model is set to Estimate_ZTD_Grad, a more
precise troposphere model is applied with strict mapping functions
as9:
where \(Az_{r}^{(s)}\) is the azimuth angle of satellite direction (rad), and \(G_{E,r}\) and \(G_{N,r}\) are the east and north components of the tropospheric gradient, respectively. The zenith total delay \(Z_{T,r}\) and the gradient parameters \(G_{E,r}\) and \(G_{N,r}\) are estimated as unknown parameters in the parameter estimation process.
A de-noising Kalman filter for the PVT solution
The PVT block can apply a simple Kalman filter to the computed PVT solutions.
This filter can be enabled by setting PVT.enable_pvt_kf=true in the
configuration file. The structure of this filter is as follows:
-
State model: \(\begin{equation} \mathbf{x} = \left[ x, y, z, v_x, v_y, v_z \right]^{T} \end{equation}\)
\[\begin{equation} \mathbf{x}_k = \mathbf{F} \mathbf{x}_{k-1} + \mathbf{v}_k~, \quad \mathbf{v}_k \sim \mathcal{N}(\mathbf{0},\mathbf{Q}) \end{equation}\] \[\begin{equation} \textbf{F} = \left[ \begin{array}{cccccc} 1 & 0 & 0 & T & 0 & 0 \\ 0 & 1 & 0 & 0 & T & 0 \\ 0 & 0 & 1 & 0 & 0 & T \\ 0 & 0 & 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 0 & 0 & 1 \end{array} \right] \end{equation}\] \[\begin{equation} \textbf{Q} = \begin{bmatrix} \sigma_{s\_pos}^{2} & 0 & 0 & 0 & 0 & 0 \\ 0 & \sigma_{s\_pos}^{2} & 0 & 0 & 0 & 0 \\ 0 & 0 & \sigma_{s\_pos}^{2} & 0 & 0 & 0 \\ 0 & 0 & 0 & \sigma_{s\_vel}^{2} & 0 & 0 \\ 0 & 0 & 0 & 0 & \sigma_{s\_vel}^{2} & 0 \\ 0 & 0 & 0 & 0 & 0 & \sigma_{s\_vel}^{2} \end{bmatrix} \end{equation}\] -
Measurement model: \(\begin{equation} \mathbf{z} = \left[ x , y , z , v_{x}, v_{y}, v_{z} \right]^{T} \end{equation}\)
\[\begin{equation} \mathbf{z}_k = \mathbf{H}\mathbf{x}_k + \mathbf{w}_k , \quad \mathbf{w}_k \sim \mathcal{N}(\mathbf{0},\mathbf{R}) \end{equation}\] \[\begin{equation} \textbf{H} = \begin{bmatrix} 1 & 0 & 0 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 0 & 0 & 1 \end{bmatrix} \end{equation}\] \[\begin{equation} \textbf{R} = \begin{bmatrix} \sigma_{m\_pos}^{2} & 0 & 0 & 0 & 0 & 0 \\ 0 & \sigma_{m\_pos}^{2} & 0 & 0 & 0 & 0 \\ 0 & 0 & \sigma_{m\_pos}^{2} & 0 & 0 & 0 \\ 0 & 0 & 0 & \sigma_{m\_vel}^{2} & 0 & 0 \\ 0 & 0 & 0 & 0 & \sigma_{m\_vel}^{2} & 0 \\ 0 & 0 & 0 & 0 & 0 & \sigma_{m\_vel}^{2} \end{bmatrix} \end{equation}\] -
Initialization: \(\begin{equation} \mathbf{x}_{0|0} = \left[ \begin{array}{cccc} x_{0} & y_{0} & z_{0} & v_{x_{0}} & v_{y_{0}} & v_{z_{0}} \end{array} \right]^T \end{equation}\)
\[\begin{equation} \mathbf{P}_{0|0} = \begin{bmatrix} \sigma_{s\_pos}^{2} & 0 & 0 & 0 & 0 & 0 \\ 0 & \sigma_{s\_pos}^{2} & 0 & 0 & 0 & 0 \\ 0 & 0 & \sigma_{s\_pos}^{2} & 0 & 0 & 0 \\ 0 & 0 & 0 & \sigma_{s\_vel}^{2} & 0 & 0 \\ 0 & 0 & 0 & 0 & \sigma_{s\_vel}^{2} & 0 \\ 0 & 0 & 0 & 0 & 0 & \sigma_{s\_vel}^{2} \end{bmatrix} \end{equation}\] -
Prediction: \(\begin{equation} \hat{\mathbf{x}}_{k|k-1} = \mathbf{F} \hat{\mathbf{x}}_{k-1|k-1} \end{equation}\)
\[\begin{equation} \mathbf{P}_{k|k-1} = \mathbf{F} \mathbf{P}_{k-1|k-1} \mathbf{F}^T + \mathbf{Q} \end{equation}\] -
Update: \(\begin{equation} \mathbf{K}_k = \mathbf{P}_{k|k-1} \mathbf{H}^T \left( \mathbf{H}\mathbf{P}_{k|k-1} \mathbf{H}^T + \mathbf{R} \right)^{-1} \end{equation}\)
\[\begin{equation} \hat{\mathbf{x}}_{k|k} = \hat{\mathbf{x}}_{k|k-1} + \mathbf{K}_k \left( \mathbf{z}_k - \mathbf{H}_k\hat{\mathbf{x}}_{k|k-1} \right) \end{equation}\] \[\begin{equation} \mathbf{P}_{k|k} = \left( \mathbf{I} - \mathbf{K}_{k} \mathbf{H} \right)\mathbf{P}_{k|k-1} \end{equation}\]
The following parameters are exposed in the configuration, here with their default values:
- \[\sigma_{m\_pos} = \text{PVT.kf_measures_ecef_pos_sd_m} = 1.0 \text {, in [m].}\]
- \[\sigma_{m\_vel} = \text{PVT.kf_measures_ecef_vel_sd_ms} = 0.1 \text {, in [m/s].}\]
- \[\sigma_{s\_pos} = \text{PVT.kf_system_ecef_pos_sd_m} = 0.01 \text {, in [m].}\]
- \[\sigma_{s\_vel} = \text{PVT.kf_system_ecef_vel_sd_ms} = 0.001 \text {, in [m/s].}\]
Output formats
Depending on the specific application or service that is exploiting the information provided by GNSS-SDR, different internal data will be required. The software provides such output data in standard formats:
KML, GeoJSON, GPX
For Geographic Information Systems, map representation and Earth browsers: KML, GeoJSON, and GPX files are generated by default, upon the computation of the first position fix.
RINEX
For post-processing applications: RINEX
2.11 and
3.02. Version 3.02 is
generated by default, and version 2.11 can be requested by setting
PVT.rinex_version=2 in the configuration file.
IMPORTANT: In order to get well-formatted GeoJSON, KML, GPX, and RINEX
files, always terminate gnss-sdr execution by pressing key ‘q’ and then key
‘ENTER’. Those files will be automatically deleted if no position fix has been
obtained during the execution of the software receiver.
NMEA-0183
For sensor integration: NMEA-0183. A
text file containing NMEA messages is stored with a default name of
gnss_sdr_pvt.nmea, configurable via PVT.nmea_dump_filename. In addition,
NMEA messages can be forwarded to a serial port by setting
PVT.flag_nmea_tty_port=true. The default port is /dev/tty1, and can be
configured via PVT.nmea_dump_devname.
RTCM-104
For real-time, possibly networked processing:
RTCM-104
messages, v3.2. A TCP/IP server of RTCM messages can be enabled by setting
PVT.flag_rtcm_server=true in the configuration file, and will be active during
the execution of the software receiver. By default, the server will operate on
port 2101 (which is the recommended port for RTCM services according to the
Internet Assigned Numbers Authority,
IANA), and will identify
the Reference Station with ID=1234. These values can be changed with
PVT.rtcm_tcp_port and PVT.rtcm_station_id. The rate of the generated RTCM
messages can be tuned with the options PVT.rtcm_MT1045_rate_ms (it defaults to
5000 ms), PVT.rtcm_MT1019_rate_ms (it defaults to 5000 ms),
PVT.rtcm_MSM_rate_ms (it defaults to 1000 ms). The RTCM messages can
also be forwarded to the serial port PVT.rtcm_dump_devname (it defaults to
/dev/pts/1) by setting PVT.flag_rtcm_tty_port=true in the configuration
file.
Custom streaming
In addition to the standard output formats, the PVT block offers a custom
mechanism for streaming its internal data members to local or remote clients
over UDP through a monitoring port which can be enabled by setting
PVT.enable_monitor=true in the configuration file. This feature is very useful
for real-time monitoring of the PVT block and its outputs. By default, the data
is streamed to the localhost address on port 1234 UDP. These settings can be
changed with PVT.monitor_client_addresses and PVT.monitor_udp_port. The
streamed data members (28 in total) are serialized via Protocol
Buffers into a format defined
at
monitor_pvt.proto.
This allows other applications to easily read those messages, either using C++,
Java, Python, C#, Dart, Go, or Ruby, among other languages, hence enhancing
Interoperability.
The following table shows the complete list of streamed parameters:
| Name | Type | Description |
|---|---|---|
tow_at_current_symbol_ms |
uint32_t |
Time of week of the current symbol, in [ms]. |
week |
uint32_t |
PVT GPS week. |
rx_time |
double |
PVT GPS time. |
user_clk_offset |
double |
User clock offset, in [s]. |
pos_x |
double |
Position X component in ECEF, expressed in [m]. |
pos_y |
double |
Position Y component in ECEF, expressed in [m]. |
pos_z |
double |
Position Z component in ECEF, expressed in [m]. |
vel_x |
double |
Velocity X component in ECEF, expressed in [m/s]. |
vel_y |
double |
Velocity Y component in ECEF, expressed in [m/s]. |
vel_z |
double |
Velocity Z component in ECEF, expressed in [m/s]. |
cov_xx |
double |
Position variance in the X component, \(\sigma_{xx}^2\), in [\(m^2\)]. |
cov_yy |
double |
Position variance in the Y component, \(\sigma_{yy}^2\), in [\(m^2\)]. |
cov_zz |
double |
Position variance in the X component, \(\sigma_{zz}^2\), in [\(m^2\)]. |
cov_xy |
double |
Position XY covariance \(\sigma_{xy}^2\), in [\(m^2\)]. |
cov_yz |
double |
Position YZ covariance \(\sigma_{yz}^2\), in [\(m^2\)]. |
cov_zx |
double |
Position ZX covariance \(\sigma_{zx}^2\), in [\(m^2\)]. |
latitude |
double |
Latitude, in [deg]. Positive: North. |
longitude |
double |
Longitude, in [deg]. Positive: East. |
height |
double |
Height, in [m]. |
valid_sats |
uint32_t |
Number of valid satellites. |
solution_status |
uint32_t |
RTKLIB solution status. |
solution_type |
uint32_t |
RTKLIB solution type (0: xyz-ecef, 1: enu-baseline). |
ar_ratio_factor |
float |
Ambiguity resolution ratio factor for validation. |
ar_ratio_threshold |
float |
Ambiguity resolution ratio threshold for validation. |
gdop |
double |
Geometric dilution of precision (GDOP). |
pdop |
double |
Position (3D) dilution of precision (PDOP). |
hdop |
double |
Horizontal dilution of precision (HDOP). |
vdop |
double |
Vertical dilution of precision (VDOP). |
user_clk_drift_ppm |
double |
User clock drift, in parts per million. |
utc_time |
string |
PVT UTC time (RFC 3339 datetime string). This metric is available starting from GNSS-SDR v0.0.19. |
vel_e |
double |
East component of the velocity in the local ENU frame, in m/s. This metric is available starting from GNSS-SDR v0.0.19. |
vel_n |
double |
North component of the velocity in the local ENU frame, in m/s. This metric is available starting from GNSS-SDR v0.0.19. |
vel_u |
double |
Up component of the velocity in the local ENU frame, in m/s. This metric is available starting from GNSS-SDR v0.0.19. |
cog |
double |
Course Over Ground, in degrees. This metric is available starting from GNSS-SDR v0.0.19. |
galhas_status |
uint32_t |
Galileo HAS status (0: not available; 1: HAS corrections applied). This metric is available starting from GNSS-SDR v0.0.19. |
geohash |
string |
Encoded geographic location. This metric is available starting from GNSS-SDR v0.0.19. |
The PVT monitor can also stream GPS and Galileo ephemeris data by setting
PVT.enable_monitor_ephemeris=true in the configuration file. The streamed data
members are serialized via Protocol
Buffers into formats defined
at
gps_ephemeris.proto
and
galileo_ephemeris.proto,
prepended by character G for GPS data and by character E for Galileo data.
By default, data are streamed to the localhost address on port 1234 UDP.
These settings can be changed with PVT.monitor_ephemeris_client_addresses and
PVT.monitor_ephemeris_udp_port parameters in the configuration file.
Read more about standard output formats on our Interoperability page.
Implementation: RTKLIB_PVT
This implementation makes use of the positioning libraries of RTKLIB, a well-known open-source program package for standard and precise positioning. It accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.SUPL_gps_ephemeris_xml |
Name of an XML file containing GPS ephemeris data. It defaults to ./gps_ephemeris.xml |
Optional |
GNSS-SDR.pre_2009_file |
[true, false]: If you are processing raw data files containing GPS L1 C/A signals dated before July 14, 2009, you can set this parameter to true in order to get the right date and time. It defaults to false. |
Optional |
| Parameter | Description | Required |
|---|---|---|
implementation |
RTKLIB_PVT |
Mandatory |
output_rate_ms |
Rate at which PVT solutions will be computed, in ms. The minimum is 20 ms, and the value must be a multiple of it. It defaults to 500 ms. | Optional |
display_rate_ms |
Rate at which PVT solutions will be displayed in the terminal, in ms. It must be multiple of output_rate_ms. It defaults to 500 ms. |
Optional |
positioning_mode |
[Single, PPP_Static, PPP_Kinematic] Set positioning mode. Single: Single point positioning. PPP_Static: Precise Point Positioning with static mode. PPP_Kinematic: Precise Point Positioning for a moving receiver. It defaults to Single. |
Optional |
num_bands |
[1: L1 Single frequency, 2: L1 and L2 Dual‐frequency, 3: L1, L2 and L5 Triple‐frequency] This option is automatically configured according to the Channels configuration. This option can be useful to force some configuration (e.g., single-band solution in a dual-frequency receiver). |
Optional |
elevation_mask |
Set the elevation mask angle, in degrees. It defaults to \(15^{o}\). | Optional |
dynamics_model |
[0: Off, 1: On] Set the dynamics model of the receiver. If set to \(1\) and PVT.positioning_mode=PPP_Kinematic, the receiver position is predicted with the estimated velocity and acceleration. It defaults to \(0\) (no dynamics model). |
Optional |
iono_model |
[OFF, Broadcast, Iono-Free-LC]. Set ionospheric correction options. OFF: Not apply the ionospheric correction. Broadcast: Apply broadcast ionospheric model. Iono‐Free-LC: Ionosphere‐free linear combination with dual-frequency (L1‐L2 for GPS or L1‐L5 for Galileo) measurements is used for ionospheric correction. It defaults to OFF (no ionospheric correction) |
Optional |
trop_model |
[OFF, Saastamoinen, Estimate_ZTD, Estimate_ZTD_Grad]. Set whether tropospheric parameters (zenith total delay at rover and base‐station positions) are estimated or not. OFF: Not apply troposphere correction. Saastamoinen: Apply Saastamoinen model. Estimate_ZTD: Estimate ZTD (zenith total delay) parameters as EKF states. Estimate_ZTD_Grad: Estimate ZTD and horizontal gradient parameters as EKF states. If defaults to OFF (no troposphere correction). |
Optional |
enable_rx_clock_correction |
[true, false]: If set to true, the receiver makes use of the PVT solution to correct timing in observables, hence providing continuous measurements in long observation periods. If set to false, the Time solution is only used in the computation of Observables when the clock offset estimation exceeds the value of max_clock_offset_ms. This parameter defaults to false. |
Optional |
max_clock_offset_ms |
If enable_rx_clock_correction is set to false, this parameter sets the maximum allowed local clock offset with respect to the Time solution. If the estimated offset exceeds this parameter, a clock correction is applied to the computation of Observables. It defaults to 40 ms. |
Optional |
code_phase_error_ratio_l1 |
Code/phase error ratio \(R_r\) for the L1 band. It defaults to \(100\). | Optional |
carrier_phase_error_factor_a |
Carrier phase error factor \(a_{\sigma}^2\). It defaults to \(0.003\) m. | Optional |
carrier_phase_error_factor_b |
Carrier phase error factor \(b_{\sigma}^2\). It defaults to \(0.003\) m. | Optional |
slip_threshold |
Set the cycle‐slip threshold (m) of geometry‐free LC carrier‐phase difference between epochs. It defaults to \(0.05\). | Optional |
threshold_reject_GDOP |
Set the reject threshold of GDOP. If the GDOP is over the value, the observable is excluded for the estimation process as an outlier. It defaults to \(30.0\). | Optional |
threshold_reject_innovation |
Set the reject threshold of innovation (pre‐fit residual) (m). If the innovation is over the value, the observable is excluded for the estimation process as an outlier. It defaults to \(30.0\) m. | Optional |
number_filter_iter |
Set the number of iteration in the measurement update of the estimation filter. If the baseline length is very short like 1 m, the iteration may be effective to handle the nonlinearity of the measurement equation. It defaults to 1. | Optional |
sigma_bias |
Set the process noise standard deviation of carrier‐phase bias \(\sigma_{bias}\), in cycles/\(\sqrt{s}\). It defaults to \(0.0001\) cycles/\(\sqrt{s}\). | Optional |
sigma_trop |
Set the process noise standard deviation of zenith tropospheric delay \(\sigma_{Z}\), in m/\(\sqrt{s}\). It defaults to \(0.0001\) m/\(\sqrt{s}\). | Optional |
raim_fde |
[0, 1]: Set whether RAIM (receiver autonomous integrity monitoring) FDE (fault detection and exclusion) feature is enabled or not. It defaults to \(0\) (RAIM not enabled) |
Optional |
reject_GPS_IIA |
[0, 1]: Set whether the GPS Block IIA satellites are excluded or not. Those satellites often degrade the PPP solutions due to unpredicted behavior of yaw‐attitude. It defaults to \(0\) (no rejection). |
Optional |
phwindup |
[0, 1]: Set whether the phase windup correction \(\phi_{pw}\) for PPP modes is applied or not. It defaults to \(0\) (no phase windup correction). |
Optional |
earth_tide |
[0, 1]: Set whether earth tides correction is applied or not. If set to \(1\), the solid earth tides correction \(\mathbf{d}_{r,disp}\) is applied to the PPP solution, following the description in IERS Technical Note No. 323, Chapter 7. It defaults to \(0\) (no Earth tide correction). |
Optional |
output_enabled |
[true, false]: If set to false, output data files are not stored. It defaults to true. |
Optional |
rtcm_output_file_enabled |
[true, false]: If set to false, RTCM binary files are not stored. It defaults to false. |
Optional |
gpx_output_enabled |
[true, false]: If set to false, GPX files are not stored. It defaults to output_enabled. |
Optional |
geojson_output_enabled |
[true, false]: If set to false, GeoJSON files are not stored. It defaults to output_enabled. |
Optional |
kml_output_enabled |
[true, false]: If set to false, KML files are not stored. It defaults to output_enabled. |
Optional |
xml_output_enabled |
[true, false]: If set to false, XML files are not stored. It defaults to output_enabled. |
Optional |
rinex_output_enabled |
[true, false]: If set to false, RINEX files are not stored. It defaults to output_enabled. |
Optional |
rinex_version |
[2: version 2.11, 3: version 3.02] Version of the generated RINEX files. It defaults to 3. |
Optional |
rinex_name |
Sets the base name of the RINEX files. If this parameter is not specified, a default one will be assigned. The command-line flag --RINEX_name, if present, overrides this parameter. |
Optional |
rinexobs_rate_ms |
Rate at which observations are annotated in the RINEX file, in ms. The minimum is 20 ms, and must be a multiple of output_rate_ms. It defaults to 1000 ms. |
Optional |
nmea_output_file_enabled |
[true, false]: If set to false, NMEA sentences are not stored. It defaults to true. |
Optional |
nmea_dump_filename |
Name of the file containing the generated NMEA sentences in ASCII format. It defaults to ./nmea_pvt.nmea. |
Optional |
flag_nmea_tty_port |
[true, false]: If set to true, the NMEA sentences are also sent to a serial port device. It defaults to false. |
Optional |
nmea_dump_devname |
If flag_nmea_tty_port is set to true, descriptor of the serial port device. It defaults to /dev/tty1. |
Optional |
flag_rtcm_server |
[true, false]: If set to true, it runs up a TCP server that is serving RTCM messages to the connected clients during the execution of the software receiver. It defaults to false. |
Optional |
rtcm_tcp_port |
If flag_rtcm_server is set to true, TCP port from which the RTCM messages will be served. It defaults to 2101. |
Optional |
rtcm_station_id |
Station ID reported in the generated RTCM messages. It defaults to 1234. | Optional |
rtcm_MT1045_rate_ms |
Rate at which RTCM Message Type 1045 (Galileo Ephemeris data) will be generated, in ms. If set to 0, mutes this message. It defaults to 5000 ms. |
Optional |
rtcm_MT1019_rate_ms |
Rate at which RTCM Message Type 1019 (GPS Ephemeris data) will be generated, in ms. If set to 0, mutes this message. It defaults to 5000 ms. |
Optional |
rtcm_MSM_rate_ms |
Default rate at which RTCM Multiple Signal Messages will be generated. It defaults to 1000 ms. | Optional |
rtcm_MT1077_rate_ms |
Rate at which RTCM Multiple Signal Messages GPS MSM7 (MT1077 - Full GPS observations) will be generated, in ms. If set to 0, mutes this message. It defaults to rtcm_MSM_rate_ms. |
Optional |
rtcm_MT1097_rate_ms |
Rate at which RTCM Multiple Signal Messages Galileo MSM7 (MT1097 - Full Galileo observations) will be generated, in ms. If set to 0, mutes this message. It defaults to rtcm_MSM_rate_ms. |
Optional |
flag_rtcm_tty_port |
[true, false]: If set to true, the generated RTCM messages are also sent to a serial port device. It defaults to false. |
Optional |
rtcm_dump_devname |
If flag_rtcm_tty_port is set to true, descriptor of the serial port device. It defaults to /dev/pts/1. |
Optional |
output_path |
Base path in which output data files will be stored. If the specified path does not exist, it will be created. It defaults to the current path ./. |
Optional |
rinex_output_path |
Base path in which RINEX files will be stored. If the specified path does not exist, it will be created. It defaults to output_path. |
Optional |
gpx_output_path |
Base path in which GPX files will be stored. If the specified path does not exist, it will be created. It defaults to output_path. |
Optional |
geojson_output_path |
Base path in which GeoJSON files will be stored. If the specified path does not exist, it will be created. It defaults to output_path. |
Optional |
kml_output_path |
Base path in which KML files will be stored. If the specified path does not exist, it will be created. It defaults to output_path. |
Optional |
xml_output_path |
Base path in which XML files will be stored. If the specified path does not exist, it will be created. It defaults to output_path. |
Optional |
nmea_output_file_path |
Base path in which NMEA messages will be stored. If the specified path does not exist, it will be created. It defaults to output_path. |
Optional |
rtcm_output_file_path |
Base path in which RTCM binary files will be stored. If the specified path does not exist, it will be created. It defaults to output_path. |
Optional |
kml_rate_ms |
Output rate of the KML annotations, in ms. It defaults to the value set by output_rate. |
Optional |
gpx_rate_ms |
Output rate of the GPX annotations, in ms. It defaults to the value set by output_rate. |
Optional |
geojson_rate_ms |
Output rate of the GeoJSON annotations, in ms. It defaults to the value set by output_rate. |
Optional |
nmea_rate_ms |
Output rate of the NMEA messages, in ms. It defaults to the value set by output_rate. |
Optional |
dump |
[true, false]: If set to true, it enables the PVT internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, name of the file in which internal data will be stored. This parameter accepts either a relative or an absolute path; if there are non-existing specified folders, they will be created. It defaults to ./pvt.dat. |
Optional |
dump_mat |
[true, false]. If dump=true, when the receiver exits it can convert the “.dat” file stored by this block into a “.mat” file directly readable from Matlab and Octave. If the receiver has processed more than a few minutes of signal, this conversion can take a long time. In systems with limited resources, you can turn off this conversion by setting this parameter to false. It defaults to true, so the “.mat” file is generated by default if dump=true. |
Optional |
enable_monitor |
[true, false]: If set to true, the PVT real-time monitoring port is activated. This feature allows streaming the internal parameters and outputs of the PVT block to local or remote clients over UDP. The streamed data members (28 in total) are the same ones that are included in the binary dump. It defaults to false. |
Optional |
monitor_client_addresses |
Destination IP address(es) of the real-time monitoring port. To specify multiple clients, use an underscore delimiter character ( _ ) between addresses. As many addresses can be added as deemed necessary. Duplicate addresses are ignored. It defaults to 127.0.0.1 (localhost). |
Optional |
monitor_udp_port |
Destination UDP port number of the real-time monitoring port. Must be within the range from 0 to 65535. Ports outside this range are treated as 0. The port number is the same for all the clients. It defaults to 1234. To specify multiple ports, use an underscore delimiter character ( _ ) between ports. |
Optional |
enable_monitor_ephemeris |
[true, false]: If set to true, the PVT real-time monitoring port streams ephemeris data to local or remote clients over UDP. It defaults to false. |
Optional |
monitor_ephemeris_client_addresses |
Destination IP address(es) of the real-time monitoring port for ephemeris data. To specify multiple clients, use an underscore delimiter character ( _ ) between addresses. As many addresses can be added as deemed necessary. Duplicate addresses are ignored. It defaults to 127.0.0.1 (localhost). |
Optional |
monitor_ephemeris_udp_port |
Destination UDP port number of the real-time monitoring port for ephemeris data. Must be within the range from 0 to 65535. Ports outside this range are treated as 0. The port number is the same for all the clients. It defaults to 1234. |
Optional |
enable_protobuf |
[true, false]: If set to true, the data serialization is done using Protocol Buffers, with the format defined at monitor_pvt.proto. An example of usage is the gnss-sdr-monitor. If set to false, it uses Boost Serialization. For an example of usage of the latter, check the gnss-sdr-pvt-monitoring-client. This parameter defaults to true (Protocol Buffers is used). |
Optional |
use_e6_for_pvt |
[true, false]: If set to false, the PVT engine will ignore observables from Galileo E6B signals. It defaults to true, so observables will be used if found. This feature is present in GNSS-SDR v0.0.18 and later versions. |
Optional |
use_has_corrections |
[true, false]: If set to false, the PVT engine will ignore corrections from the Galileo High Accuracy Service. It defaults to true, so corrections will be applied if available. This feature is present in GNSS-SDR v0.0.18 and later versions. |
Optional |
enable_pvt_kf |
[true, false]: If set to true, it enables the Kalman filter of the PVT solution. It defaults to false. This configuration parameter is available starting from GNSS-SDR v0.0.19. |
Optional |
kf_measures_ecef_pos_sd_m |
Standard deviation of the position estimations, in meters. It defaults to 1.0 [m]. Only used if PVT.enable_pvt_kf=true. This configuration parameter is available starting from GNSS-SDR v0.0.19. |
Optional |
kf_measures_ecef_vel_sd_ms |
Standard deviation of the velocity estimations, in meters per second. It defaults to 0.1 [m/s]. Only used if PVT.enable_pvt_kf=true. This configuration parameter is available starting from GNSS-SDR v0.0.19. |
Optional |
kf_system_ecef_pos_sd_m |
Standard deviation of the dynamic system model for position, in meters. It defaults to 2.0 [m]. Only used if PVT.enable_pvt_kf=true. This configuration parameter is available starting from GNSS-SDR v0.0.19. |
Optional |
kf_system_ecef_vel_sd_ms |
Standard deviation of the dynamic system model for velocity, in meters per second. It defaults to 0.5 [m/s]. Only used if PVT.enable_pvt_kf=true. This configuration parameter is available starting from GNSS-SDR v0.0.19. |
Optional |
use_unhealthy_sats |
[true, false]: If set to true, the PVT engine will use observables from satellites flagged as unhealthy in the navigation message. It defaults to false, so those observables will be ignored. This feature is present in GNSS-SDR v0.0.18 and later versions. |
Optional |
show_local_time_zone |
[true, false]: If set to true, the time of the PVT solution displayed in the terminal is shown in the local time zone, referred to UTC. It defaults to false, so time is shown in UTC. This parameter does not affect time annotations in other output formats, which are always UTC. |
Optional |
rtk_trace_level |
Configure the RTKLIB trace level (0: off, up to 5: max. verbosity). When set to something > 2, the RTKLIB library become more verbose in the internal logging file. It defaults to 0 (off). |
Optional |
bancroft_init |
[true, false]: If set to false, the Bancroft initialization in the first iteration of the PVT computation is skipped. It defaults to true. This feature is present in GNSS-SDR v0.0.18 and later versions. |
Optional |
PVT implementation: RTKLIB_PVT.
Example:
;######### PVT CONFIG ############
PVT.implementation=RTKLIB_PVT
PVT.positioning_mode=PPP_Static
PVT.output_rate_ms=100
PVT.display_rate_ms=500
PVT.iono_model=Broadcast
PVT.trop_model=Saastamoinen
PVT.flag_rtcm_server=true
PVT.flag_rtcm_tty_port=false
PVT.rtcm_dump_devname=/dev/pts/1
PVT.rtcm_tcp_port=2101
PVT.rtcm_MT1019_rate_ms=5000
PVT.rtcm_MT1045_rate_ms=5000
PVT.rtcm_MT1097_rate_ms=1000
PVT.rtcm_MT1077_rate_ms=1000
PVT.rinex_version=2
The generation of output files is controlled by the parameter output_enabled.
If set to true (which is its default value), RINEX, XML, GPX, KML, GeoJSON,
NMEA and binary RTCM files will be generated. You can turn off the generation of
such files by setting output_enabled=false, and then select, for instance,
rinex_output_enabled=true or kml_output_enabled=true. Files are stored in
the path indicated in output_path, which by default is the current folder
(that is, the folder from which GNSS-SDR was called). This can be changed for
all outputs (for instance, output_path=gnss-products or
output_path=/home/user/Documents/gnss-products/day1), or it can be defined per
type of output (e.g., rinex_output_path=gnss-products/rinex,
gpx_output_path=gnss-products/gpx,
geojson_output_path=gnss-products/geojson, etc.).
Example:
PVT.output_enabled=false
PVT.rtcm_output_file_enabled=false
PVT.gpx_output_enabled=true
PVT.geojson_output_enabled=true
PVT.kml_output_enabled=true
PVT.xml_output_enabled=true
PVT.rinex_output_enabled=true
PVT.nmea_output_file_enabled=false
PVT.output_path=gnss-products/others
PVT.gpx_output_path=gnss-products/gpx
PVT.kml_output_path=./
PVT.xml_output_path=./
PVT.rinex_output_path=gnss-products/rinex
This will create in your current directory:
.
├── PVT_181028_093651.kml
├── gnss-products
│ ├── gpx
│ │ └── PVT_181028_093651.gpx
│ ├── others
│ │ └── PVT_181028_093651.geojson
│ └── rinex
│ ├── GSDR301j36.18N
│ └── GSDR301j36.18O
└── gps_ephemeris.xml
In order to shut down the generation of output files, you can just include in your configuration file the line:
PVT.output_enabled=false
Please note that this only concerns the generation of mentioned file formats,
and it does not affect the generation of dump files activated in the
configuration of each processing block. If the RTCM server is activated with
flag_rtcm_server=true, it will still work even if the binary RTCM file is
deactivated with rtcm_output_file_enabled=false.
References
-
N. Ashby, The Sagnac Effect in the Global Positioning System, Chapter 1 in Relativity in Rotating Frames: Relativistic Physics in Rotating Reference Frames (Fundamental Theories of Physics), G. Rizzi , M.L. Ruggiero (Eds.), Kluwer Academic Publishers, Dordrecht, The Netherlands, 2004. ↩
-
T. Takasu, RTKLIB ver. 2.4.2 Manual. April 29, 2013. ↩
-
D. McCarthy, G. Petit (Eds.), IERS Conventions (2003), IERS Technical Note No. 32, International Earth Rotation and Reference Systems Service, Frankfurt (Germany), 2004. ↩ ↩2
-
Kouba, P. Héroux, Precise Point Positioning Using IGS Orbit and Clock Products, GPS Solutions, Vol. 5, no. 2, 2001, pp. 12-28. ↩
-
Global Positioning System Directorate, Interface Specification IS-GPS-200N: Navstar GPS Space Segment/Navigation User Interfaces, August 2022. ↩
-
J. A. Klobuchar, Ionospheric time-delay algorithms for single-frequency GPS users. IEEE Transactions on Aerospace and Electronic Systems, Vol AES-23, no. 3, May 1987, pp. 325-331. ↩
-
M. Bevis, S. Businger, S. Chiswell, T. A. Herring, R. A. Anthes, C. Rocken, R. H. Ware, GPS Meteorology: Mapping Zenith Delay onto Precipitable Water, American Meteorological Society, vol. 33, March 1994, pp. 379-386. ↩
-
A. E. Niell, Global mapping functions for the atmosphere delay at radio wavelengths, Journal of Geophysical Research: Solid Earth, Volume 101, Issue B2 10, Feb. 1996, pp. 3227-3246. ↩
-
D. S. MacMillan, Atmospheric gradients from very long baseline interferometry observation, in Geophysical Research Letters, Volume 22, Issue 9, May 1995, pp. 1041-1044. ↩