Acquisition
A generic GNSS signal defined by its complex baseband equivalent, \(s_{T}(t)\), the digital signal at the input of an Acquisition block can be written as:
\[\begin{equation} \label{xin} x_\text{IN}[k] = A(t)\tilde{s}_{T}(t - \tau(t))e^{j \left( 2\pi f_D(t) t + \phi(t) \right) } \Bigr \rvert_{t=kT_s} + n(t) \Bigr \rvert_{t=kT_s} \end{equation}\]where \(A(t)\) is the signal amplitude, \(\tilde{s}_{T}(t)\) is a filtered version of \(s_T(t)\), \(\tau(t)\) is a time-varying code delay, \(f_D(t)\) is a time-varying Doppler shift, \(\phi(t)\) is a time-varying carrier phase shift, \(n(t)\) is a term modeling random noise and \(T_s\) is the sampling period.
The role of an Acquisition block is the detection of the presence/absence of signals coming from a given GNSS satellite. In the case of a positive detection, it should provide coarse estimations of the code phase \(\hat{\tau}_{acq}\) and the Doppler shift \(\hat{f}_{\!D_{acq}}\), yet accurate enough to initialize the delay and phase tracking loops.
By exploiting the concepts and methodology of estimation theory, it is possible to show that the maximum likelihood (ML) estimates of \(f_D\) and \(\tau\) can be obtained by maximizing the function
\[\begin{equation} \hat{f}_{\!D_{ML}}, \hat{\tau}_{ML} = \arg \max_{f_D,\tau} \left\{ \left| \hat{R}_{xd}(f_D,\tau)\right|^2\right\}~, \end{equation}\]where
\[\begin{equation} \hat{R}_{xd}(f_D,\tau) = \frac{1}{K}\sum_{k=0}^{K-1}x_{\text{IN}}[k]d[kT_s - \tau]e^{-j 2 \pi f_D kT_s}~, \end{equation}\]\(x_{\text{IN}}[k]\) is a complex vector containing I&Q samples of the received signal, \(T_s\) is the sampling period, \(\tau\) is the code phase of the received signal with respect to a local reference, \(f_D\) is the Doppler shift, \(K\) is the number of samples in a spreading code (4 ms for Galileo E1, 1 ms for GPS L1, etc.), and \(d[k]\) is a locally generated reference. The maximization in the equation above requires a two-dimensional search in a function which output results from a multiplication-and-sum of \(K\) complex samples, becoming the computational bottleneck of the whole process. A usual method to alleviate this issue is to resort to the FFT-based circular convolution, which exchanges the expensive multiplication-and-sum operation by a discrete Fourier transform, a vector product, and an inverse transform, taking advantage of the efficient implementations available for such operations1.
The magnitude of \(|\hat{R}_{xd}(f_D,\tau)|\), also known as cross-ambiguity function, is also used to decide whether the satellite corresponding to the local replica \(d[k]\) is in view or it is not. Resorting to signal detection theory, it is possible to define tests statistics with desirable properties. A criterion commonly used for a detection problem is the maximization of the detection probability (\(P_d\)) subject to a given false alarm probability (\(P_{fa}\)). It is well-known in the literature that the optimum solution to that problem can be found by applying the Neyman-Pearson approach, which requires perfect knowledge of the signal parameters and constitutes the uniformly most powerful test. Assuming additive white Gaussian noise and replacing the true synchronization parameters by their ML estimators in the Neyman-Pearson detector, one obtains the Generalized Likelihood Ratio Test (GLRT) function, which can be written as:
\[\begin{equation} T_{\text{GLRT}}\left(\mathbf{x}_{\text{IN}}\right) = \max_{f_D,\tau}\left\{ \frac{\left| \hat{R}_{xd}(f_D,\tau) \right|^2}{\hat{R}_{xx}} \right\}~, \end{equation}\]where \(\hat{R}_{xx}\) is an estimation of the input signal power. It can be shown that this acquisition test statistic is a Constant False Alarm Rate (CFAR) detector because \(P_{fa}\) does not depend on the noise power.
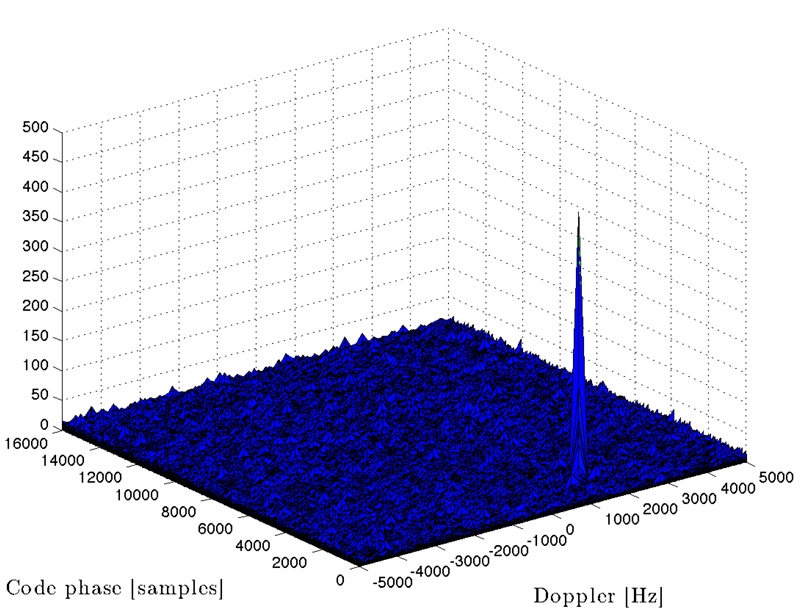 GLRT statistic for Parallel Code Phase Search acquisition algorithm for a
configuration of \(f_{IN} = 4\) Msps, a frequency span of \(\pm 5\) kHz with
steps of \(250\) Hz, and using the E1B sinBOC local replica for Galileo’s IOV
satellite PRN 112.
GLRT statistic for Parallel Code Phase Search acquisition algorithm for a
configuration of \(f_{IN} = 4\) Msps, a frequency span of \(\pm 5\) kHz with
steps of \(250\) Hz, and using the E1B sinBOC local replica for Galileo’s IOV
satellite PRN 112.
GPS L1 C/A signal acquisition
Implementation: GPS_L1_CA_PCPS_Acquisition
The Parallel Code Phase Search (PCPS) algorithm is described as follows:
- Require: Input signal buffer \(\mathbf{x}_{\text{IN}}\) of \(K\) complex samples, provided by the Signal Conditioner; on-memory FFT of the local replica, \(D[k]=FFT_{K}\left\{d[k]\right\}\); acquisition threshold \(\gamma\); freq. span \([f_{min}\; f_{max}]\); freq. step \(f_{step}\).
- Ensure: Decision positive or negative signal acquisition. In the case of positive detection, it provides coarse estimations of code phase \(\hat{\tau}_{acq}\) and Doppler shift \(\hat{f}_{\!D_{acq}}\) to the Tracking block.
-
Compute input signal power estimation: \(\hat{P}_{in} = \frac{1}{K}\sum_{k=0}^{K-1}\left|x_{\text{IN}}[k]\right|^2\).
- for \(\check{f}_D=f_{min}\) to \(\check{f}_D = f_{max}\) in \(f_{step}\) steps:
- Carrier wipe-off: \(x[k] = x_{\text{IN}}[k] \cdot e^{-(j2\pi \check{f}_D k T_s)}\), for \(k = 0,...,K-1\).
- Compute \(X[k] = \text{FFT}_{K}\left\{ x[k]\right\}\).
- Compute \(Y[k] = X[k] \cdot D[k]\), for \(k = 0,...,K-1\).
- Compute \(R_{xd}(\check{f}_D, \boldsymbol{\tau}) = \frac{1}{K^2}\text{IFFT}_{K}\left\{Y[k]\right\}\).
-
end for
-
Search maximum and its indices in the search grid: \(\left\{S_{max}, f_i, \tau_j \right\} \quad \Leftarrow \quad \max_{f,\tau}\left|R_{xd}(f,\tau)\right|^2\)
-
Compute the GLRT function with normalized variance: \(\Gamma_{\text{GLRT}} = \frac{2\cdot K \cdot S_{max}}{\hat{P}_{in}}\)
- if \(\Gamma_{\text{GLRT}}>\gamma\)
- Declare positive acquisition and provide \(\hat{f}_{\!D_{acq}} = f_i\) and \(\hat{\tau}_{acq} = \tau_j\).
- else
- Declare negative acquisition.
- endif
The computation of the Fast Fourier Transform and its inverse (second and fourth steps inside the for loop) are performed by means of GNU Radio wrappers of the FFTW library, an efficient implementation for computing the discrete Fourier transform, whereas the products (first and third steps in the for loop) are implemented with the Vector-Optimized Library of Kernels (VOLK), which generates processor-specific Single-Input Multiple-Data (SIMD) assembly instructions that take advantage of parallel computing techniques and allow writing efficient and portable code.
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
GNSS-SDR.use_acquisition_resampler |
[true, false]: If set to true, the Acquisition block makes use of the minimum possible sample rate during acquisition by setting a resampler at its input. This allows reducing the FFT size when using high data rates at GNSS-SDR.internal_fs_sps. All the required setup is configured automatically. It defaults to false. |
Optional |
| Parameter | Description | Required |
|---|---|---|
implementation |
GPS_L1_CA_PCPS_Acquisition |
Mandatory |
item_type |
[gr_complex, cshort, cbyte]: Set the sample data type expected at the block input. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to 5000 Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present). | Optional |
pfa |
If defined, it supersedes the threshold value and computes a new threshold \(\gamma_{pfa}\) based on the Probability of False Alarm. It defaults to \(0.0\) (i.e., not set). |
Optional |
coherent_integration_time_ms |
Set the integration time \(T_{int}\), in ms. It defaults to 1 ms. | Optional |
bit_transition_flag |
[true, false]: If set to true, it takes into account the possible presence of a bit transition, so the effective integration time is doubled. When set, it invalidates the value of max_dwells. It defaults to false. |
Optional |
max_dwells |
Set the maximum number of non-coherent dwells to declare a signal present. It defaults to 1. | Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
blocking |
[true, false]: If set to false, the acquisition workload is executed in a separate thread, outside the GNU Radio scheduler that manages the flow graph, and the block skips over samples that arrive while the processing thread is busy. This is especially useful in real-time operation using radio frequency front-ends, overcoming the processing bottleneck for medium and high sampling rates. However, this breaks the determinism provided by the GNU Radio scheduler, and different processing results can be obtained in different machines. Do not use this option for file processing. It defaults to true. |
Optional |
make_two_steps |
[true, false]: If set to true, an acquisition refinement stage is performed after a signal is declared present. This allows providing an updated, refined Doppler estimation to the Tracking block. It defaults to false. |
Optional |
second_nbins |
If make_two_steps is set to true, this parameter sets the number of bins done in the acquisition refinement stage. It defaults to 4. |
Optional |
second_doppler_step |
If make_two_steps is set to true, this parameter sets the Doppler step applied in the acquisition refinement stage, in Hz. It defaults to 125 Hz. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, name of the file in which internal data will be stored. This parameter accepts either a relative or an absolute path; if there are non-existing specified folders, they will be created. It defaults to ./acquisition, so files with name ./acquisition_G_1C_ch_N_K_sat_P.mat (where N is the channel number defined by dump_channel, K is the dump number, and P is the targeted satellite’s PRN number) will be generated. |
Optional |
dump_channel |
If dump is set to true, channel number from which internal data will be stored. It defaults to 0. |
Optional |
Acquisition implementation: GPS_L1_CA_PCPS_Acquisition.
Example:
;######### ACQUISITION CONFIG FOR GPS L1 CHANNELS ############
Acquisition_1C.implementation=GPS_L1_CA_PCPS_Acquisition
Acquisition_1C.doppler_max=5000
Acquisition_1C.doppler_step=250
Acquisition_1C.pfa=0.01
Acquisition_1C.coherent_integration_time_ms=1
Acquisition_1C.max_dwells=1
Implementation: GPS_L1_CA_PCPS_Acquisition_Fine_Doppler
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
| Parameter | Description | Required |
|---|---|---|
implementation |
GPS_L1_CA_PCPS_Acquisition_Fine_Doppler |
Mandatory |
item_type |
[gr_complex]: Set the sample data type expected at the block input. Only gr_complex is defined in this version. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to \(5000\) Hz. | Optional |
doppler_min |
Minimum Doppler value in the search grid, in Hz. It defaults to \(-5000\) Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present), | Optional |
coherent_integration_time_ms |
Set the integration time \(T_{int}\), in ms. It defaults to 1 ms. | Optional |
max_dwells |
Set the maximum number of non-coherent dwells to declare a signal present. It defaults to 1. | Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, name of the file in which internal data will be stored. It defaults to ./acquisition.dat |
Optional |
Acquisition implementation: GPS_L1_CA_PCPS_Fine_Doppler_Acquisition.
Example:
;######### ACQUISITION CONFIG FOR GPS L1 CHANNELS ############
Acquisition_1C.implementation=GPS_L1_CA_PCPS_Acquisition_Fine_Doppler
Acquisition_1C.threshold=0.007
Acquisition_1C.doppler_max=10000
Acquisition_1C.doppler_min=-10000
Acquisition_1C.doppler_step=500
Acquisition_1C.max_dwells=10
Implementation: GPS_L1_CA_PCPS_Tong_Acquisition
On top of the PCPS Algorithm (or any other providing the same outputs), we could integrate results from more than one consecutive code periods in order to enhance the acquisition sensitivity, understood as the minimum signal power at which a receiver can correctly identify the presence of a particular satellite signal in the incoming RF signal within a given time-out interval.
This is the case of the Tong detector3, a sequential variable dwell time detector with a reasonable computation burden and proves good for acquiring signals with low \(C/N_0\) levels. During the signal search, the up/down counter \(\mathcal{K}\) is incremented by one if the correlation peak value exceeds the threshold, otherwise it is decremented by one. If the counter has reached the maximum count value \(A\), the signal is declared ‘present’ and the search is terminated. Similarly, if the counter contents reach zero, the signal is declared ‘absent’ and the search is terminated. So that the Tong detector is not trapped into an extended dwell in the same cell, under certain poor signal conditions, another counter (\(\mathcal{K}_{max}\)) sets the limit on the maximum number of dwells.
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
| Parameter | Description | Required |
|---|---|---|
implementation |
GPS_L1_CA_Tong_PCPS_Acquisition |
Mandatory |
item_type |
[gr_complex]: Set the sample data type expected at the block input. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to 5000 Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present), | Optional |
pfa |
If defined, it supersedes the threshold value and computes a new threshold \(\gamma_{pfa}\) based on the Probability of False Alarm. It defaults to \(0.0\) (i.e., not set). |
Optional |
coherent_integration_time_ms |
Set the integration time \(T_{int}\), in ms. It defaults to 1 ms. | Optional |
tong_init_val |
Initial value of the Tong counter \(\mathcal{K}\). It defaults to 1. | Optional |
tong_max_val |
Count value \(A\) that, if reached by counter \(\mathcal{K}\), declares a signal as present. It defaults to 2. | Optional |
tong_max_dwells |
Maximum number of dwells in a search \(\mathcal{K}_{max}\). It defaults to tong_max_val \(+1\). |
Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, name of the file in which internal data will be stored. It defaults to ./acquisition.dat |
Optional |
Acquisition implementation: GPS_L1_CA_PCPS_Tong_Acquisition.
Example:
;######### ACQUISITION CONFIG FOR GPS L1 CHANNELS ############
Acquisition_1C.implementation=GPS_L1_CA_PCPS_Tong_Acquisition
Acquisition_1C.pfa=0.0001
Acquisition_1C.doppler_max=10000
Acquisition_1C.doppler_step=250
Acquisition_1C.tong_init_val=2
Acquisition_1C.tong_max_val=10
Acquisition_1C.tong_max_dwells=20
Galileo E1 signal acquisition
The Galileo E1 Open Service signal can be written as:4
\[\begin{eqnarray} s^{\text{(Gal E1)}}_{T}(t)& = &\frac{1}{\sqrt{2}} \Big( e_{E1B}(t) \left(\alpha sc_A(t) + \beta sc_B(t) \right)~ + \nonumber \\ {} & {} & -~e_{E1C}(t) \left(\alpha sc_A(t) - \beta sc_B(t) \right) \Big)~, \end{eqnarray}\]where \(sc_A(t)\) and \(sc_B(t)\) are the subcarriers defined as \(sc_A(t) = \text{sign}\Big(\sin(2\pi f_{s,E1A}t) \Big)\) and \(sc_B(t) = \text{sign}\Big(\sin(2\pi f_{s, E1B}t) \Big)\), with \(f_{s,E1A}=1.023\) MHz and \(f_{s, E1B}=6.138\) MHz.
Channel B contains the I/NAV type of navigation message, \(D_{I/NAV}\), and can be expressed as:
\[\begin{equation} e_{E1B}(t) = \sum_{l=-\infty}^{+\infty} D_{\text{I/NAV}} \Big[ [l]_{4092}\Big] \oplus C_{E1B}\Big[|l|_{4092}\Big] \cdot p(t - lT_{c,E1B})~. \end{equation}\]In the case of channel C, it is a pilot (dataless) channel with a secondary code with a length of 100 ms, forming a tiered code:
\[\!\!\!\!\!\!\!\!\!\!\!\begin{equation} e_{E1C}(t) =\!\! \sum_{m=-\infty}^{+\infty}\!C_{E1Cs}\Big[|m|_{25}\Big] \oplus \sum_{l=1}^{4092}C_{E1Cp}\Big[ l \Big] \cdot p(t \! - \! mT_{c,E1Cs} \! - \! lT_{c,E1Cp})~, \end{equation}\]with \(T_{c,E1B}=T_{c,E1Cp}=\frac{1}{1.023}\) \(\mu\)s and \(T_{c,E1Cs}=4\) ms.
Implementation: Galileo_E1_PCPS_Ambiguous_Acquisition
This implementation permits the configuration of the shape of the local replica \(d[k]\), allowing for simplifications that reduce the computational load. As shown in the figure below, in narrowband receivers the CBOC waveform can be substituted by a sinBOC modulation with a very small performance penalty5. For the E1B signal component, the reference signals available in this implementation are:
\[\begin{equation} d_{E1B}^{(\text{CBOC})}[n] = \sum_{l=-\infty}^{+\infty} C_{E1B}\Big[|l|_{4092}\Big] p(t - lT_{c,E1B}) \cdot \left( \alpha sc_A[n] + \beta sc_B[n] \right) \end{equation}\]or
\[\begin{equation} \label{eq:dE1BsinBOC} d_{E1B}^{(\text{sinBOC})}[n] = \sum_{l=-\infty}^{+\infty} C_{E1B}\Big[|l|_{4092}\Big] p(t - lT_{c,E1B}) sc_A[n]~, \end{equation}\]while for E1C, users can choose among:
\[\begin{eqnarray} d_{E1C}^{(\text{CBOC})}[n] & = &\sum_{m=-\infty}^{+\infty} \sum_{l=1}^{4092}\! C_{E1Cp}\Big[ l \Big] \! \cdot \! p[n\! -\! mT_{c,E1Cs} - lT_{c,E1Cp}] \cdot \nonumber \\ {} & {} & \cdot \left( \alpha sc_A[n] + \beta sc_B[n] \right) \end{eqnarray}\]or
\[\!\!\!\!\begin{equation} d_{E1C}^{(\text{sinBOC})}[n] = \! \sum_{m=-\infty}^{+\infty} \! \sum_{l=1}^{4092}C_{E1Cp}\Big[ l \Big] \! \cdot \! p[n \! - \! mT_{c,E1Cs} \! - \! lT_{c,E1Cp}] \cdot sc_A[n]~. \end{equation}\]The simpler sinBOC options are chosen by default. CBOC versions can be set by
Acquisition_1B.cboc=true. Next figure plots the shape of the cross-correlation
function for those waveforms:
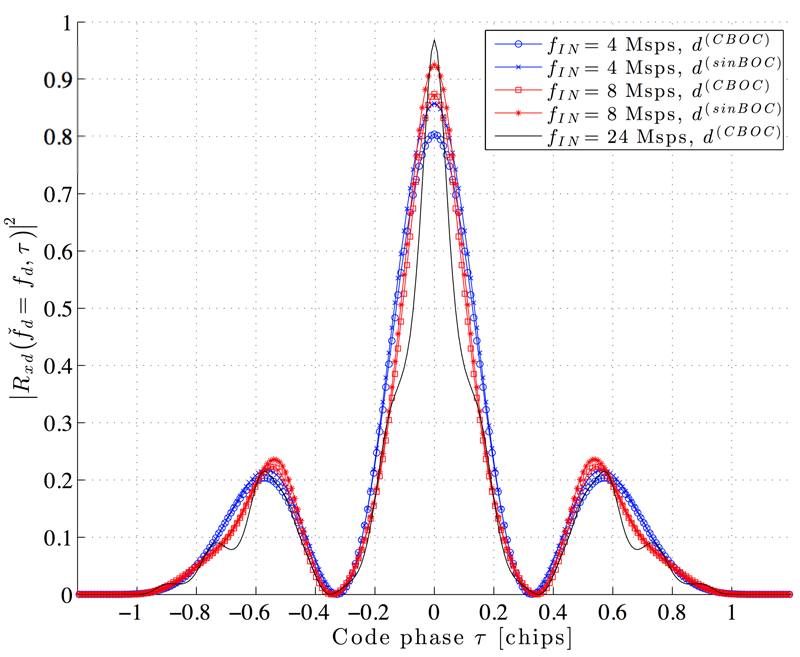 Normalized \(\left|R_{xd}\left(\check{f}_D = f_D, \tau \right) \right|^2\) for different sampling rates and local reference waveforms2.
Normalized \(\left|R_{xd}\left(\check{f}_D = f_D, \tau \right) \right|^2\) for different sampling rates and local reference waveforms2.
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
GNSS-SDR.use_acquisition_resampler |
[true, false]: If set to true, the Acquisition block makes use of the minimum possible sample rate during acquisition by setting a resampler at its input. This allows reducing the FFT size when using high data rates at GNSS-SDR.internal_fs_sps. All the required setup is configured automatically. It defaults to false. |
Optional |
| Parameter | Description | Required |
|---|---|---|
implementation |
Galileo_E1_PCPS_Ambiguous_Acquisition |
Mandatory |
item_type |
[gr_complex, cshort, cbyte]: Set the sample data type expected at the block input. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to 5000 Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present), | Optional |
pfa |
If defined, it supersedes the threshold value and computes a new threshold \(\gamma_{pfa}\) based on the Probability of False Alarm. It defaults to \(0.0\) (i.e., not set). |
Optional |
cboc |
[true, false]: If set to true the algorithm uses the CBOC waveform , if set to false a simpler sinBOC waveform is used. It defaults to false. |
Optional |
coherent_integration_time_ms |
Set the integration time \(T_{int}\), in ms. Should be a multiple of 4 ms. It defaults to 4 ms. | Optional |
acquire_pilot |
[true, false]: If set to true, sets the receiver to acquire the E1C pilot component. It defaults to false (that is, the receiver is set to acquire the E1B data component). |
Optional |
bit_transition_flag |
[true, false]: If set to true, it takes into account the possible presence of a bit transition, so the effective integration time is doubled. When set, it invalidates the value of max_dwells. It defaults to false. |
Optional |
max_dwells |
Set the maximum number of non-coherent dwells to declare a signal present. It defaults to 1. | Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
blocking |
[true, false]: If set to false, the acquisition workload is executed in a separate thread, outside the GNU Radio scheduler that manages the flow graph, and the block skips over samples that arrive while the processing thread is busy. This is especially useful in real-time operation using radio frequency front-ends, overcoming the processing bottleneck for medium and high sampling rates. However, this breaks the determinism provided by the GNU Radio scheduler, and different processing results can be obtained in different machines. Do not use this option for file processing. It defaults to true. |
Optional |
make_two_steps |
[true, false]: If set to true, an acquisition refinement stage is performed after a signal is declared present. This allows providing an updated, refined Doppler estimation to the Tracking block. It defaults to false. |
Optional |
second_nbins |
If make_two_steps is set to true, this parameter sets the number of bins done in the acquisition refinement stage. It defaults to 4. |
Optional |
second_doppler_step |
If make_two_steps is set to true, this parameter sets the Doppler step applied in the acquisition refinement stage, in Hz. It defaults to 125 Hz. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, name of the file in which internal data will be stored. This parameter accepts either a relative or an absolute path; if there are non-existing specified folders, they will be created. It defaults to ./acquisition, so files with name ./acquisition_E_1B_ch_N_K_sat_P.mat (where N is the channel number defined by dump_channel, K is the dump number, and P is the targeted satellite’s PRN number) will be generated. |
Optional |
dump_channel |
If dump is set to true, channel number from which internal data will be stored. It defaults to 0. |
Optional |
Acquisition implementation: Galileo_E1_PCPS_Ambiguous_Acquisition.
Example:
;######### ACQUISITION CONFIG FOR GALILEO E1 CHANNELS ############
Acquisition_1B.implementation=Galileo_E1_PCPS_Ambiguous_Acquisition
Acquisition_1B.pfa=0.01
Acquisition_1B.doppler_max=5000
Acquisition_1B.doppler_step=250
Acquisition_1B.coherent_integration_time_ms=4
Acquisition_1B.max_dwells=1
Implementation: Galileo_E1_PCPS_Tong_Ambiguous_Acquisition
The Tong detector3 is a sequential variable dwell time detector with a reasonable computation burden that proves good for acquiring signals with low \(C/N_0\) levels. During the signal search, the up/down counter \(\mathcal{K}\) is incremented by one if the correlation peak value exceeds the threshold, otherwise it is decremented by one. If the counter has reached the maximum count value \(A\), the signal is declared ‘present’ and the search is terminated. Similarly, if the counter contents reach zero, the signal is declared ‘absent’ and the search is terminated. So that the Tong detector is not trapped into an extended dwell in the same cell, under certain poor signal conditions, another counter (\(\mathcal{K}_{max}\)) sets the limit on the maximum number of dwells.
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
| Parameter | Description | Required |
|---|---|---|
implementation |
Galileo_E1_PCPS_Tong_Ambiguous_Acquisition |
Mandatory |
item_type |
[gr_complex]: Set the sample data type expected at the block input. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to 5000 Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present), | Optional |
pfa |
If defined, it supersedes the threshold value and computes a new threshold \(\gamma_{pfa}\) based on the Probability of False Alarm. It defaults to \(0.0\) (i.e., not set). |
Optional |
coherent_integration_time_ms |
Set the integration time \(T_{int}\), in ms. Should be a multiple of 4 ms. It defaults to 4 ms. | Optional |
tong_init_val |
Initial value of the Tong counter \(\mathcal{K}\). It defaults to 1. | Optional |
tong_max_val |
Count value \(A\) that, if reached by counter \(\mathcal{K}\), declares a signal as present. It defaults to 2. | Optional |
tong_max_dwells |
Maximum number of dwells in a search \(\mathcal{K}_{max}\). It defaults to tong_max_val \(+1\). |
Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, name of the file in which internal data will be stored. It defaults to ./acquisition.dat |
Optional |
Acquisition implementation: Galileo_E1_PCPS_Tong_Ambiguous_Acquisition.
Example:
;######### ACQUISITION CONFIG FOR GALILEO E1 CHANNELS ############
Acquisition_1B.implementation=Galileo_E1_PCPS_Tong_Ambiguous_Acquisition
Acquisition_1B.pfa=0.0001
Acquisition_1B.doppler_max=10000
Acquisition_1B.doppler_step=250
Acquisition_1B.tong_init_val=2
Acquisition_1B.tong_max_val=10
Acquisition_1B.tong_max_dwells=20
Glonass L1 C/A signal acquisition
Implementation: GLONASS_L1_CA_PCPS_Acquisition
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
| Parameter | Description | Required |
|---|---|---|
implementation |
GLONASS_L1_CA_PCPS_Acquisition |
Mandatory |
item_type |
[gr_complex, cshort, cbyte]: Set the sample data type expected at the block input. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to 5000 Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present), | Optional |
pfa |
If defined, it supersedes the threshold value and computes a new threshold \(\gamma_{pfa}\) based on the Probability of False Alarm. It defaults to \(0.0\) (i.e., not set). |
Optional |
coherent_integration_time_ms |
Set the integration time \(T_{int}\), in ms. It defaults to 1 ms. | Optional |
bit_transition_flag |
[true, false]: If set to true, it takes into account the possible presence of a bit transition, so the effective integration time is doubled. When set, it invalidates the value of max_dwells. It defaults to false. |
Optional |
max_dwells |
Set the maximum number of non-coherent dwells to declare a signal present. It defaults to 1. | Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
blocking |
[true, false]: If set to false, the acquisition workload is executed in a separate thread, outside the GNU Radio scheduler that manages the flow graph, and the block skips over samples that arrive while the processing thread is busy. This is especially useful in real-time operation using radio frequency front-ends, overcoming the processing bottleneck for medium and high sampling rates. However, this breaks the determinism provided by the GNU Radio scheduler, and different processing results can be obtained in different machines. Do not use this option for file processing. It defaults to true. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, name of the file in which internal data will be stored. It defaults to ./acquisition.dat |
Optional |
dump_channel |
If dump is set to true, channel number from which internal data will be stored. It defaults to 0. |
Optional |
Acquisition implementation: GLONASS_L1_CA_PCPS_Acquisition.
Example:
;######### ACQUISITION CONFIG FOR GLONASS L1 CHANNELS ############
Acquisition_1G.implementation=GLONASS_L1_CA_PCPS_Acquisition
Acquisition_1G.doppler_max=8000
Acquisition_1G.doppler_step=250
Acquisition_1G.pfa=0.0001
BeiDou B1I signal acquisition
Implementation: BEIDOU_B1I_PCPS_Acquisition
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
GNSS-SDR.use_acquisition_resampler |
[true, false]: If set to true, the Acquisition block makes use of the minimum possible sample rate during acquisition by setting a resampler at its input. This allows reducing the FFT size when using high data rates at GNSS-SDR.internal_fs_sps. All the required setup is configured automatically. It defaults to false. |
Optional |
| Parameter | Description | Required |
|---|---|---|
implementation |
BEIDOU_B1I_PCPS_Acquisition |
Mandatory |
item_type |
[gr_complex, cshort, cbyte]: Set the sample data type expected at the block input. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to 5000 Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present). | Optional |
pfa |
If defined, it supersedes the threshold value and computes a new threshold \(\gamma_{pfa}\) based on the Probability of False Alarm. It defaults to \(0.0\) (i.e., not set). |
Optional |
coherent_integration_time_ms |
Set the integration time \(T_{int}\), in ms. It defaults to 1 ms. | Optional |
bit_transition_flag |
[true, false]: If set to true, it takes into account the possible presence of a bit transition, so the effective integration time is doubled. When set, it invalidates the value of max_dwells. It defaults to false. |
Optional |
max_dwells |
Set the maximum number of non-coherent dwells to declare a signal present. It defaults to 1. | Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
blocking |
[true, false]: If set to false, the acquisition workload is executed in a separate thread, outside the GNU Radio scheduler that manages the flow graph, and the block skips over samples that arrive while the processing thread is busy. This is especially useful in real-time operation using radio frequency front-ends, overcoming the processing bottleneck for medium and high sampling rates. However, this breaks the determinism provided by the GNU Radio scheduler, and different processing results can be obtained in different machines. Do not use this option for file processing. It defaults to true. |
Optional |
make_two_steps |
[true, false]: If set to true, an acquisition refinement stage is performed after a signal is declared present. This allows providing an updated, refined Doppler estimation to the Tracking block. It defaults to false. |
Optional |
second_nbins |
If make_two_steps is set to true, this parameter sets the number of bins done in the acquisition refinement stage. It defaults to 4. |
Optional |
second_doppler_step |
If make_two_steps is set to true, this parameter sets the Doppler step applied in the acquisition refinement stage, in Hz. It defaults to 125 Hz. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, name of the file in which internal data will be stored. This parameter accepts either a relative or an absolute path; if there are non-existing specified folders, they will be created. It defaults to ./acquisition, so files with name ./acquisition_C_1C_ch_N_K_sat_P.mat (where N is the channel number defined by dump_channel, K is the dump number, and P is the targeted satellite’s PRN number) will be generated. |
Optional |
dump_channel |
If dump is set to true, channel number from which internal data will be stored. It defaults to 0. |
Optional |
Acquisition implementation: BEIDOU_B1I_PCPS_Acquisition.
Example:
;######### ACQUISITION CONFIG FOR BeiDou B1I CHANNELS ############
Acquisition_B1.implementation=BEIDOU_B1I_PCPS_Acquisition
Acquisition_B1.doppler_max=5000
Acquisition_B1.doppler_step=250
Acquisition_B1.pfa=0.01
Acquisition_B1.coherent_integration_time_ms=1
Acquisition_B1.max_dwells=1
QZSS L1 C/A signal acquisition
Implementation: QZSS_L1_PCPS_Acquisition
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
GNSS-SDR.use_acquisition_resampler |
[true, false]: If set to true, the Acquisition block makes use of the minimum possible sample rate during acquisition by setting a resampler at its input. This allows reducing the FFT size when using high data rates at GNSS-SDR.internal_fs_sps. All the required setup is configured automatically. It defaults to false. |
Optional |
| Parameter | Description | Required |
|---|---|---|
implementation |
QZSS_L1_PCPS_Acquisition |
Mandatory |
item_type |
[gr_complex, cshort, cbyte]: Set the sample data type expected at the block input. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to 5000 Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present). | Optional |
pfa |
If defined, it supersedes the threshold value and computes a new threshold \(\gamma_{pfa}\) based on the Probability of False Alarm. It defaults to \(0.0\) (i.e., not set). |
Optional |
coherent_integration_time_ms |
Set the integration time \(T_{int}\), in ms. It defaults to 1 ms. | Optional |
bit_transition_flag |
[true, false]: If set to true, it takes into account the possible presence of a bit transition, so the effective integration time is doubled. When set, it invalidates the value of max_dwells. It defaults to false. |
Optional |
max_dwells |
Set the maximum number of non-coherent dwells to declare a signal present. It defaults to 1. | Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
blocking |
[true, false]: If set to false, the acquisition workload is executed in a separate thread, outside the GNU Radio scheduler that manages the flow graph, and the block skips over samples that arrive while the processing thread is busy. This is especially useful in real-time operation using radio frequency front-ends, overcoming the processing bottleneck for medium and high sampling rates. However, this breaks the determinism provided by the GNU Radio scheduler, and different processing results can be obtained in different machines. Do not use this option for file processing. It defaults to true. |
Optional |
make_two_steps |
[true, false]: If set to true, an acquisition refinement stage is performed after a signal is declared present. This allows providing an updated, refined Doppler estimation to the Tracking block. It defaults to false. |
Optional |
second_nbins |
If make_two_steps is set to true, this parameter sets the number of bins done in the acquisition refinement stage. It defaults to 4. |
Optional |
second_doppler_step |
If make_two_steps is set to true, this parameter sets the Doppler step applied in the acquisition refinement stage, in Hz. It defaults to 125 Hz. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, name of the file in which internal data will be stored. This parameter accepts either a relative or an absolute path; if there are non-existing specified folders, they will be created. It defaults to ./acquisition, so files with name ./acquisition_G_1C_ch_N_K_sat_P.mat (where N is the channel number defined by dump_channel, K is the dump number, and P is the targeted satellite’s PRN number) will be generated. |
Optional |
dump_channel |
If dump is set to true, channel number from which internal data will be stored. It defaults to 0. |
Optional |
Acquisition implementation: QZSS_L1_PCPS_Acquisition.
Example:
;######### ACQUISITION CONFIG FOR QZSS L1 CHANNELS ############
Acquisition_J1.implementation=QZSS_L1_PCPS_Acquisition
Acquisition_J1.doppler_max=5000
Acquisition_J1.doppler_step=250
Acquisition_J1.pfa=0.01
Acquisition_J1.coherent_integration_time_ms=1
Acquisition_J1.max_dwells=1
GPS L2CM signal acquisition
Implementation: GPS_L2_M_PCPS_Acquisition
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
GNSS-SDR.use_acquisition_resampler |
[true, false]: If set to true, the Acquisition block makes use of the minimum possible sample rate during acquisition by setting a resampler at its input. This allows reducing the FFT size when using high data rates at GNSS-SDR.internal_fs_sps. All the required setup is configured automatically. It defaults to false. |
Optional |
| Parameter | Description | Required |
|---|---|---|
implementation |
GPS_L2_M_PCPS_Acquisition |
Mandatory |
item_type |
[gr_complex, cshort, cbyte]: Set the sample data type expected at the block input. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to 5000 Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present), | Optional |
pfa |
If defined, it supersedes the threshold value and computes a new threshold \(\gamma_{pfa}\) based on the Probability of False Alarm. It defaults to \(0.0\) (i.e., not set). |
Optional |
coherent_integration_time_ms |
Set the integration time \(T_{int}\), in ms. It defaults to 20 ms. | Optional |
bit_transition_flag |
[true, false]: If set to true, it takes into account the possible presence of a bit transition, so the effective integration time is doubled. When set, it invalidates the value of max_dwells. It defaults to false. |
Optional |
max_dwells |
Set the maximum number of non-coherent dwells to declare a signal present. It defaults to 1. | Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
blocking |
[true, false]: If set to false, the acquisition workload is executed in a separate thread, outside the GNU Radio scheduler that manages the flow graph, and the block skips over samples that arrive while the processing thread is busy. This is especially useful in real-time operation using radio frequency front-ends, overcoming the processing bottleneck for medium and high sampling rates. However, this breaks the determinism provided by the GNU Radio scheduler, and different processing results can be obtained in different machines. Do not use this option for file processing. It defaults to true. |
Optional |
make_two_steps |
[true, false]: If set to true, an acquisition refinement stage is performed after a signal is declared present. This allows providing an updated, refined Doppler estimation to the Tracking block. It defaults to false. |
Optional |
second_nbins |
If make_two_steps is set to true, this parameter sets the number of bins done in the acquisition refinement stage. It defaults to 4. |
Optional |
second_doppler_step |
If make_two_steps is set to true, this parameter sets the Doppler step applied in the acquisition refinement stage, in Hz. It defaults to 125 Hz. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, name of the file in which internal data will be stored. This parameter accepts either a relative or an absolute path; if there are non-existing specified folders, they will be created. It defaults to ./acquisition, so files with name ./acquisition_G_2S_ch_N_K_sat_P.mat (where N is the channel number defined by dump_channel, K is the dump number, and P is the targeted satellite’s PRN number) will be generated. |
Optional |
dump_channel |
If dump is set to true, channel number from which internal data will be stored. It defaults to 0. |
Optional |
Acquisition implementation: GPS_L2_M_PCPS_Acquisition.
Example:
;######### ACQUISITION CONFIG FOR GPS L2C CHANNELS ############
Acquisition_2S.implementation=GPS_L2_M_PCPS_Acquisition
Acquisition_2S.item_type=cshort
Acquisition_2S.pfa=0.01
Acquisition_2S.doppler_max=6000
Acquisition_2S.doppler_step=60
Acquisition_2S.coherent_integration_time_ms=20
Acquisition_2S.max_dwells=2
Glonass L2 C/A signal acquisition
Implementation: GLONASS_L2_CA_PCPS_Acquisition
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
| Parameter | Description | Required |
|---|---|---|
implementation |
GLONASS_L2_CA_PCPS_Acquisition |
Mandatory |
item_type |
[gr_complex, cshort, cbyte]: Set the sample data type expected at the block input. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to 5000 Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present), | Optional |
pfa |
If defined, it supersedes the threshold value and computes a new threshold \(\gamma_{pfa}\) based on the Probability of False Alarm. It defaults to \(0.0\) (i.e., not set). |
Optional |
coherent_integration_time_ms |
Set the integration time \(T_{int}\), in ms. It defaults to 1 ms. | Optional |
bit_transition_flag |
[true, false]: If set to true, it takes into account the possible presence of a bit transition, so the effective integration time is doubled. When set, it invalidates the value of max_dwells. It defaults to false. |
Optional |
max_dwells |
Set the maximum number of non-coherent dwells to declare a signal present. It defaults to 1. | Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
blocking |
[true, false]: If set to false, the acquisition workload is executed in a separate thread, outside the GNU Radio scheduler that manages the flow graph, and the block skips over samples that arrive while the processing thread is busy. This is especially useful in real-time operation using radio frequency front-ends, overcoming the processing bottleneck for medium and high sampling rates. However, this breaks the determinism provided by the GNU Radio scheduler, and different processing results can be obtained in different machines. Do not use this option for file processing. It defaults to true. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, name of the file in which internal data will be stored. It defaults to ./acquisition.dat |
Optional |
dump_channel |
If dump is set to true, channel number from which internal data will be stored. It defaults to 0. |
Optional |
Acquisition implementation: GLONASS_L2_CA_PCPS_Acquisition.
Example:
;######### ACQUISITION CONFIG FOR GLONASS L2 CHANNELS ############
Acquisition_2G.implementation=GLONASS_L2_CA_PCPS_Acquisition
Acquisition_2G.doppler_max=8000
Acquisition_2G.doppler_step=250
Acquisition_2G.pfa=0.0001
Galileo E6 signal acquisition
Implementation: Galileo_E6_PCPS_Acquisition
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
GNSS-SDR.use_acquisition_resampler |
[true, false]: If set to true, the Acquisition block makes use of the minimum possible sample rate during acquisition by setting a resampler at its input. This allows reducing the FFT size when using high data rates at GNSS-SDR.internal_fs_sps. All the required setup is configured automatically. It defaults to false. |
Optional |
| Parameter | Description | Required |
|---|---|---|
implementation |
Galileo_E6_PCPS_Acquisition |
Mandatory |
item_type |
[gr_complex]: Set the sample data type expected at the block input. Only gr_complex is defined in this version. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to \(5000\) Hz. | Optional |
doppler_min |
Minimum Doppler value in the search grid, in Hz. It defaults to \(-5000\) Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present), | Optional |
coherent_integration_time_ms |
Set the integration time \(T_{int}\), in ms. It defaults to 1 ms. | Optional |
max_dwells |
Set the maximum number of non-coherent dwells to declare a signal present. It defaults to 1. | Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, name of the file in which internal data will be stored. It defaults to ./acquisition.dat |
Optional |
Acquisition implementation: Galileo_E6_PCPS_Acquisition.
Example:
;######### ACQUISITION CONFIG FOR GALILEO E6 CHANNELS ############
Acquisition_E6.implementation=Galileo_E6_PCPS_Acquisition
Acquisition_E6.item_type=gr_complex
Acquisition_E6.pfa=0.001;
Acquisition_E6.blocking=true
Acquisition_E6.doppler_max=5000
Acquisition_E6.doppler_step=250
Acquisition_E6.dump=false
Acquisition_E6.dump_filename=./acq_e6_dump
Acquisition_E6.dump_channel=0
GPS L5 signal acquisition
Implementation: GPS_L5i_PCPS_Acquisition
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
GNSS-SDR.use_acquisition_resampler |
[true, false]: If set to true, the Acquisition block makes use of the minimum possible sample rate during acquisition by setting a resampler at its input. This allows reducing the FFT size when using high data rates at GNSS-SDR.internal_fs_sps. All the required setup is configured automatically. It defaults to false. |
Optional |
| Parameter | Description | Required |
|---|---|---|
implementation |
GPS_L5i_PCPS_Acquisition |
Mandatory |
item_type |
[gr_complex, cshort, cbyte]: Set the sample data type expected at the block input. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to 5000 Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present), | Optional |
pfa |
If defined, it supersedes the threshold value and computes a new threshold \(\gamma_{pfa}\) based on the Probability of False Alarm. It defaults to \(0.0\) (i.e., not set). |
Optional |
bit_transition_flag |
[true, false]: If set to true, it takes into account the possible presence of a bit transition, so the effective integration time is doubled. When set, it invalidates the value of max_dwells. It defaults to false. |
Optional |
max_dwells |
Set the maximum number of non-coherent dwells to declare a signal present. It defaults to 1. | Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
blocking |
[true, false]: If set to false, the acquisition workload is executed in a separate thread, outside the GNU Radio scheduler that manages the flow graph, and the block skips over samples that arrive while the processing thread is busy. This is especially useful in real-time operation using radio frequency front-ends, overcoming the processing bottleneck for medium and high sampling rates. However, this breaks the determinism provided by the GNU Radio scheduler, and different processing results can be obtained in different machines. Do not use this option for file processing. It defaults to true. |
Optional |
make_two_steps |
[true, false]: If set to true, an acquisition refinement stage is performed after a signal is declared present. This allows providing an updated, refined Doppler estimation to the Tracking block. It defaults to false. |
Optional |
second_nbins |
If make_two_steps is set to true, this parameter sets the number of bins done in the acquisition refinement stage. It defaults to 4. |
Optional |
second_doppler_step |
If make_two_steps is set to true, this parameter sets the Doppler step applied in the acquisition refinement stage, in Hz. It defaults to 125 Hz. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, base name of the file(s) in which internal data will be stored. This parameter accepts either a relative or an absolute path; if there are non-existing specified folders, they will be created. It defaults to ./acquisition, so files with name ./acquisition_G_L5_ch_N_K_sat_P.mat (where N is the channel number defined by dump_channel, K is the dump number, and P is the targeted satellite’s PRN number) will be generated. |
Optional |
dump_channel |
If dump is set to true, channel number from which internal data will be stored. It defaults to 0. |
Optional |
Acquisition implementation: GPS_L5i_PCPS_Acquisition.
Example:
;######### ACQUISITION CONFIG FOR GPS L5 CHANNELS ############
Acquisition_L5.implementation=GPS_L5i_PCPS_Acquisition
Acquisition_L5.item_type=cshort
Acquisition_L5.pfa=0.01
Acquisition_L5.doppler_max=6000
Acquisition_L5.doppler_step=60
Acquisition_L5.coherent_integration_time_ms=4
Acquisition_L5.max_dwells=1
Galileo E5a signal acquisition
Implementation: Galileo_E5a_Pcps_Acquisition
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
GNSS-SDR.use_acquisition_resampler |
[true, false]: If set to true, the Acquisition block makes use of the minimum possible sample rate during acquisition by setting a resampler at its input. This allows reducing the FFT size when using high data rates at GNSS-SDR.internal_fs_sps. All the required setup is configured automatically. It defaults to false. |
Optional |
| Parameter | Description | Required |
|---|---|---|
implementation |
Galileo_E5a_Pcps_Acquisition |
Mandatory |
item_type |
[gr_complex, cshort]: Set the sample data type expected at the block input. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to 5000 Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present), | Optional |
pfa |
If defined, it supersedes the threshold value and computes a new threshold \(\gamma_{pfa}\) based on the Probability of False Alarm. It defaults to \(0.0\) (i.e., not set). |
Optional |
coherent_integration_time_ms |
Set the integration time \(T_{int}\), in ms. It defaults to 1 ms. | Optional |
bit_transition_flag |
[true, false]: If set to true, it takes into account the possible presence of a bit transition, so the effective integration time is doubled. When set, it invalidates the value of max_dwells. It defaults to false. |
Optional |
max_dwells |
Set the maximum number of non-coherent dwells to declare a signal present. It defaults to 1. | Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
blocking |
[true, false]: If set to false, the acquisition workload is executed in a separate thread, outside the GNU Radio scheduler that manages the flow graph, and the block skips over samples that arrive while the processing thread is busy. This is especially useful in real-time operation using radio frequency front-ends, overcoming the processing bottleneck for medium and high sampling rates. However, this breaks the determinism provided by the GNU Radio scheduler, and different processing results can be obtained in different machines. Do not use this option for file processing. It defaults to true. |
Optional |
acquire_pilot |
[true, false]: If set to true, it enables the Acquisition of the pilot Galileo E5a signal (Q component). It defaults to false. |
Optional |
acquire_iq |
[true, false]: If set to true, it enables the Acquisition of both, data (I) and pilot (Q) components of the Galileo E5a signal and overrides acquire_pilot to false. It is suitable for increasing the acquisition sensitivity of the receiver. It defaults to false. |
Optional |
make_two_steps |
[true, false]: If set to true, an acquisition refinement stage is performed after a signal is declared present. This allows providing an updated, refined Doppler estimation to the Tracking block. It defaults to false. |
Optional |
second_nbins |
If make_two_steps is set to true, this parameter sets the number of bins done in the acquisition refinement stage. It defaults to 4. |
Optional |
second_doppler_step |
If make_two_steps is set to true, this parameter sets the Doppler step applied in the acquisition refinement stage, in Hz. It defaults to 125 Hz. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, base name of the file(s) in which internal data will be stored. This parameter accepts either a relative or an absolute path; if there are non-existing specified folders, they will be created. It defaults to ./acquisition, so files with name ./acquisition_E_5X_ch_N_K_sat_P.mat (where N is the channel number defined by dump_channel, K is the dump number, and P is the targeted satellite’s PRN number) will be generated. |
Optional |
dump_channel |
If dump is set to true, channel number from which internal data will be stored. It defaults to 0. |
Optional |
Acquisition implementation: Galileo_E5a_Pcps_Acquisition.
Example:
;######### ACQUISITION CONFIG FOR GALILEO E5a CHANNELS ############
Acquisition_5X.implementation=Galileo_E5a_Pcps_Acquisition
Acquisition_5X.doppler_max=8000
Acquisition_5X.doppler_step=250
Acquisition_5X.pfa=0.01
Acquisition_5X.coherent_integration_time_ms=1
Acquisition_5X.max_dwells=1
Implementation: Galileo_E5a_Noncoherent_IQ_Acquisition_CAF
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
| Parameter | Description | Required |
|---|---|---|
implementation |
Galileo_E5a_Noncoherent_IQ_Acquisition_CAF |
Mandatory |
item_type |
[gr_complex]: Set the sample data type expected at the block input. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to 5000 Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
CAF_window_hz |
Resolves Doppler ambiguity by averaging the specified bandwidth (in Hz) in the winner code delay. If set to \(0\), the CAF filter is deactivated. Recommended value: \(3000\) Hz. It defaults to 0 Hz. | Optional |
Zero_padding |
If set to a \(1\), it avoids power loss and doppler ambiguity in bit transitions by correlating one code with twice the input data length, ensuring that at least one full code is present without transitions. It defaults to \(0\) (i.e., deactivated). | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present), | Optional |
pfa |
If defined, it supersedes the threshold value and computes a new threshold \(\gamma_{pfa}\) based on the Probability of False Alarm. It defaults to \(0.0\) (i.e., not set). |
Optional |
coherent_integration_time_ms |
Set the integration time \(T_{int}\), in ms. Should be a 3 ms or less. It defaults to 1 ms. | Optional |
bit_transition_flag |
[true, false]: If set to true, it takes into account the possible presence of a bit transition, so the effective integration time is doubled. When set, it invalidates the value of max_dwells. It defaults to false. |
Optional |
max_dwells |
Set the maximum number of non-coherent dwells to declare a signal present. It defaults to 1. | Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, name of the file in which internal data will be stored. It defaults to ./acquisition.dat |
Optional |
Acquisition implementation: Galileo_E5a_Noncoherent_IQ_Acquisition_CAF.
Example:
;######### ACQUISITION CONFIG FOR GALILEO E5a CHANNELS ############
Acquisition_5X.implementation=Galileo_E5a_Noncoherent_IQ_Acquisition_CAF
Acquisition_5X.pfa=0.01
Acquisition_5X.doppler_max=10000
Acquisition_5X.doppler_step=250
BeiDOu B3I signal acquisition
Implementation: BEIDOU_B3I_PCPS_Acquisition
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
GNSS-SDR.use_acquisition_resampler |
[true, false]: If set to true, the Acquisition block makes use of the minimum possible sample rate during acquisition by setting a resampler at its input. This allows reducing the FFT size when using high data rates at GNSS-SDR.internal_fs_sps. All the required setup is configured automatically. It defaults to false. |
Optional |
| Parameter | Description | Required |
|---|---|---|
implementation |
BEIDOU_B3I_PCPS_Acquisition |
Mandatory |
item_type |
[gr_complex, cshort, cbyte]: Set the sample data type expected at the block input. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to 5000 Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present), | Optional |
pfa |
If defined, it supersedes the threshold value and computes a new threshold \(\gamma_{pfa}\) based on the Probability of False Alarm. It defaults to \(0.0\) (i.e., not set). |
Optional |
bit_transition_flag |
[true, false]: If set to true, it takes into account the possible presence of a bit transition, so the effective integration time is doubled. When set, it invalidates the value of max_dwells. It defaults to false. |
Optional |
max_dwells |
Set the maximum number of non-coherent dwells to declare a signal present. It defaults to 1. | Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
blocking |
[true, false]: If set to false, the acquisition workload is executed in a separate thread, outside the GNU Radio scheduler that manages the flow graph, and the block skips over samples that arrive while the processing thread is busy. This is especially useful in real-time operation using radio frequency front-ends, overcoming the processing bottleneck for medium and high sampling rates. However, this breaks the determinism provided by the GNU Radio scheduler, and different processing results can be obtained in different machines. Do not use this option for file processing. It defaults to true. |
Optional |
make_two_steps |
[true, false]: If set to true, an acquisition refinement stage is performed after a signal is declared present. This allows providing an updated, refined Doppler estimation to the Tracking block. It defaults to false. |
Optional |
second_nbins |
If make_two_steps is set to true, this parameter sets the number of bins done in the acquisition refinement stage. It defaults to 4. |
Optional |
second_doppler_step |
If make_two_steps is set to true, this parameter sets the Doppler step applied in the acquisition refinement stage, in Hz. It defaults to 125 Hz. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, base name of the file(s) in which internal data will be stored. This parameter accepts either a relative or an absolute path; if there are non-existing specified folders, they will be created. It defaults to ./acquisition, so files with name ./acquisition_C_L5_ch_N_K_sat_P.mat (where N is the channel number defined by dump_channel, K is the dump number, and P is the targeted satellite’s PRN number) will be generated. |
Optional |
dump_channel |
If dump is set to true, channel number from which internal data will be stored. It defaults to 0. |
Optional |
Acquisition implementation: BEIDOU_B3I_PCPS_Acquisition.
Example:
;######### ACQUISITION CONFIG FOR BeiDou B3I CHANNELS ############
Acquisition_B3.implementation=BEIDOU_B3I_PCPS_Acquisition
Acquisition_B3.item_type=cshort
Acquisition_B3.pfa=0.01
Acquisition_B3.doppler_max=6000
Acquisition_B3.doppler_step=60
Acquisition_B3.coherent_integration_time_ms=4
Acquisition_B3.max_dwells=1
QZSS L5 signal acquisition
Implementation: QZSS_L5i_PCPS_Acquisition
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
GNSS-SDR.use_acquisition_resampler |
[true, false]: If set to true, the Acquisition block makes use of the minimum possible sample rate during acquisition by setting a resampler at its input. This allows reducing the FFT size when using high data rates at GNSS-SDR.internal_fs_sps. All the required setup is configured automatically. It defaults to false. |
Optional |
| Parameter | Description | Required |
|---|---|---|
implementation |
QZSS_L5i_PCPS_Acquisition |
Mandatory |
item_type |
[gr_complex, cshort, cbyte]: Set the sample data type expected at the block input. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to 5000 Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present), | Optional |
pfa |
If defined, it supersedes the threshold value and computes a new threshold \(\gamma_{pfa}\) based on the Probability of False Alarm. It defaults to \(0.0\) (i.e., not set). |
Optional |
bit_transition_flag |
[true, false]: If set to true, it takes into account the possible presence of a bit transition, so the effective integration time is doubled. When set, it invalidates the value of max_dwells. It defaults to false. |
Optional |
max_dwells |
Set the maximum number of non-coherent dwells to declare a signal present. It defaults to 1. | Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
blocking |
[true, false]: If set to false, the acquisition workload is executed in a separate thread, outside the GNU Radio scheduler that manages the flow graph, and the block skips over samples that arrive while the processing thread is busy. This is especially useful in real-time operation using radio frequency front-ends, overcoming the processing bottleneck for medium and high sampling rates. However, this breaks the determinism provided by the GNU Radio scheduler, and different processing results can be obtained in different machines. Do not use this option for file processing. It defaults to true. |
Optional |
make_two_steps |
[true, false]: If set to true, an acquisition refinement stage is performed after a signal is declared present. This allows providing an updated, refined Doppler estimation to the Tracking block. It defaults to false. |
Optional |
second_nbins |
If make_two_steps is set to true, this parameter sets the number of bins done in the acquisition refinement stage. It defaults to 4. |
Optional |
second_doppler_step |
If make_two_steps is set to true, this parameter sets the Doppler step applied in the acquisition refinement stage, in Hz. It defaults to 125 Hz. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, base name of the file(s) in which internal data will be stored. This parameter accepts either a relative or an absolute path; if there are non-existing specified folders, they will be created. It defaults to ./acquisition, so files with name ./acquisition_J_L5_ch_N_K_sat_P.mat (where N is the channel number defined by dump_channel, K is the dump number, and P is the targeted satellite’s PRN number) will be generated. |
Optional |
dump_channel |
If dump is set to true, channel number from which internal data will be stored. It defaults to 0. |
Optional |
Acquisition implementation: QZSS_L5i_PCPS_Acquisition.
Example:
;######### ACQUISITION CONFIG FOR QZSS L5 CHANNELS ############
Acquisition_J5.implementation=QZSS_L5i_PCPS_Acquisition
Acquisition_J5.item_type=cshort
Acquisition_J5.pfa=0.01
Acquisition_J5.doppler_max=6000
Acquisition_J5.doppler_step=60
Acquisition_J5.coherent_integration_time_ms=4
Acquisition_J5.max_dwells=1
Galileo E5b signal acquisition
Implementation: Galileo_E5b_Pcps_Acquisition
This implementation accepts the following parameters:
| Global Parameter | Description | Required |
|---|---|---|
GNSS-SDR.internal_fs_sps |
Input sample rate to the processing channels, in samples per second. | Mandatory |
GNSS-SDR.use_acquisition_resampler |
[true, false]: If set to true, the Acquisition block makes use of the minimum possible sample rate during acquisition by setting a resampler at its input. This allows reducing the FFT size when using high data rates at GNSS-SDR.internal_fs_sps. All the required setup is configured automatically. It defaults to false. |
Optional |
| Parameter | Description | Required |
|---|---|---|
implementation |
Galileo_E5b_Pcps_Acquisition |
Mandatory |
item_type |
[gr_complex, cshort]: Set the sample data type expected at the block input. It defaults to gr_complex. |
Optional |
doppler_max |
Maximum Doppler value in the search grid, in Hz. It defaults to 5000 Hz. | Optional |
doppler_step |
Frequency step in the search grid, in Hz. It defaults to 500 Hz. | Optional |
threshold |
Decision threshold \(\gamma\) from which a signal will be considered present. It defaults to \(0.0\) (i.e., all signals are declared present), | Optional |
pfa |
If defined, it supersedes the threshold value and computes a new threshold \(\gamma_{pfa}\) based on the Probability of False Alarm. It defaults to \(0.0\) (i.e., not set). |
Optional |
coherent_integration_time_ms |
Set the integration time \(T_{int}\), in ms. It defaults to 1 ms. | Optional |
bit_transition_flag |
[true, false]: If set to true, it takes into account the possible presence of a bit transition, so the effective integration time is doubled. When set, it invalidates the value of max_dwells. It defaults to false. |
Optional |
max_dwells |
Set the maximum number of non-coherent dwells to declare a signal present. It defaults to 1. | Optional |
repeat_satellite |
[true, false]: If set to true, the block will search again for the same satellite once its presence has been discarded. Useful for testing. It defaults to false. |
Optional |
blocking |
[true, false]: If set to false, the acquisition workload is executed in a separate thread, outside the GNU Radio scheduler that manages the flow graph, and the block skips over samples that arrive while the processing thread is busy. This is especially useful in real-time operation using radio frequency front-ends, overcoming the processing bottleneck for medium and high sampling rates. However, this breaks the determinism provided by the GNU Radio scheduler, and different processing results can be obtained in different machines. Do not use this option for file processing. It defaults to true. |
Optional |
acquire_pilot |
[true, false]: If set to true, it enables the Acquisition of the pilot Galileo E5b signal (Q component). It defaults to false. |
Optional |
acquire_iq |
[true, false]: If set to true, it enables the Acquisition of both, data (I) and pilot (Q) components of the Galileo E5b signal and overrides acquire_pilot to false. It is suitable for increasing the acquisition sensitivity of the receiver. It defaults to false. |
Optional |
make_two_steps |
[true, false]: If set to true, an acquisition refinement stage is performed after a signal is declared present. This allows providing an updated, refined Doppler estimation to the Tracking block. It defaults to false. |
Optional |
second_nbins |
If make_two_steps is set to true, this parameter sets the number of bins done in the acquisition refinement stage. It defaults to 4. |
Optional |
second_doppler_step |
If make_two_steps is set to true, this parameter sets the Doppler step applied in the acquisition refinement stage, in Hz. It defaults to 125 Hz. |
Optional |
dump |
[true, false]: If set to true, it enables the Acquisition internal binary data file logging. It defaults to false. |
Optional |
dump_filename |
If dump is set to true, base name of the file(s) in which internal data will be stored. This parameter accepts either a relative or an absolute path; if there are non-existing specified folders, they will be created. It defaults to ./acquisition, so files with name ./acquisition_E_7X_ch_N_K_sat_P.mat (where N is the channel number defined by dump_channel, K is the dump number, and P is the targeted satellite’s PRN number) will be generated. |
Optional |
dump_channel |
If dump is set to true, channel number from which internal data will be stored. It defaults to 0. |
Optional |
Acquisition implementation: Galileo_E5b_Pcps_Acquisition.
Example:
;######### ACQUISITION CONFIG FOR GALILEO E5a CHANNELS ############
Acquisition_7X.implementation=Galileo_E5b_PCPS_Acquisition
Acquisition_7X.item_type=gr_complex
Acquisition_7X.pfa=0.01
Acquisition_7X.blocking=true
Acquisition_7X.doppler_max=5000
Acquisition_7X.doppler_step=250
Acquisition_7X.max_dwells=1
Acquisition_7X.dump=false
Acquisition_7X.dump_filename=./acq_dump_x5
Plotting results with MATLAB/Octave
Some Acquisition block implementations are able to dump intermediate results of
the channel indicated by the dump_channel parameter in MATLAB Level 5
MAT-file
v7.3 file
format (.mat files), which can be opened in MATLAB/Octave.
The list of output variables contained in each .mat file is the following:
acq_delay_samples: Coarse estimation of time delay, in number of samples from the start of the pseudorandom code.acq_doppler_hz: Coarse estimation of Doppler shift, in Hz.acq_grid: Acquisition search grid.d_positive_acq:1if there has been a positive acquisition,0for no detection.doppler_max: Maximum Doppler shift in the search grid.doppler_step: Doppler step in the search grid.input_power: Input signal power.num_dwells: Number of dwells performed in non-coherent acquisition.PRN: Satellite ID.sample_counter: Sample counter from receiver’s start.test_statistic: Result of the test statistic.threshold: Threshold above which a signal is declared present.
Example:
Assuming that you are processing GPS L1 C/A signals, and you have included the following lines in your configuration file:
Acquisition_1C.implementation=GPS_L1_CA_PCPS_Acquisition
;... (other parameters) ...
Acquisition_1C.dump=true
Acquisition_1C.dump_filename=acq_dump
Acquisition_1C.dump_channel=0
Then, after the processing, you will get .mat files storing the results
obtained from the Acquisition block corresponding to channel 0.
The acquisition grid can be plotted from MATLAB or Octave as:
load('./acq_dump_G_1C_chan0_1_sat1.mat')
f = -doppler_max:doppler_step:(doppler_max-doppler_step);
tau = linspace(0, 1023, size(acq_grid, 1));
surf(f, tau, acq_grid); xlabel('Doppler [Hz]'); ylabel('Delay [chips]');
You should see something like:
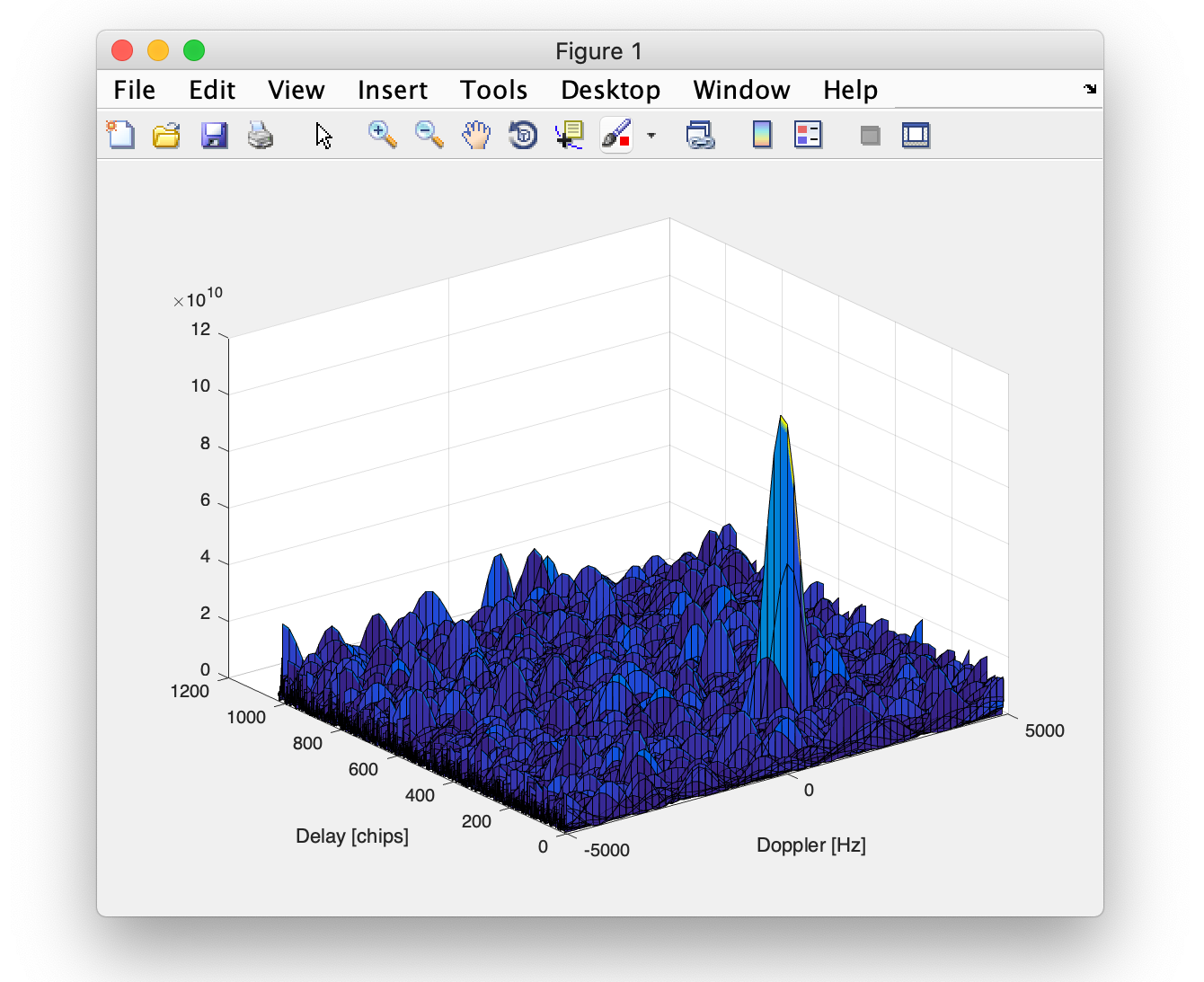 Positive acquisition.
Positive acquisition.
or
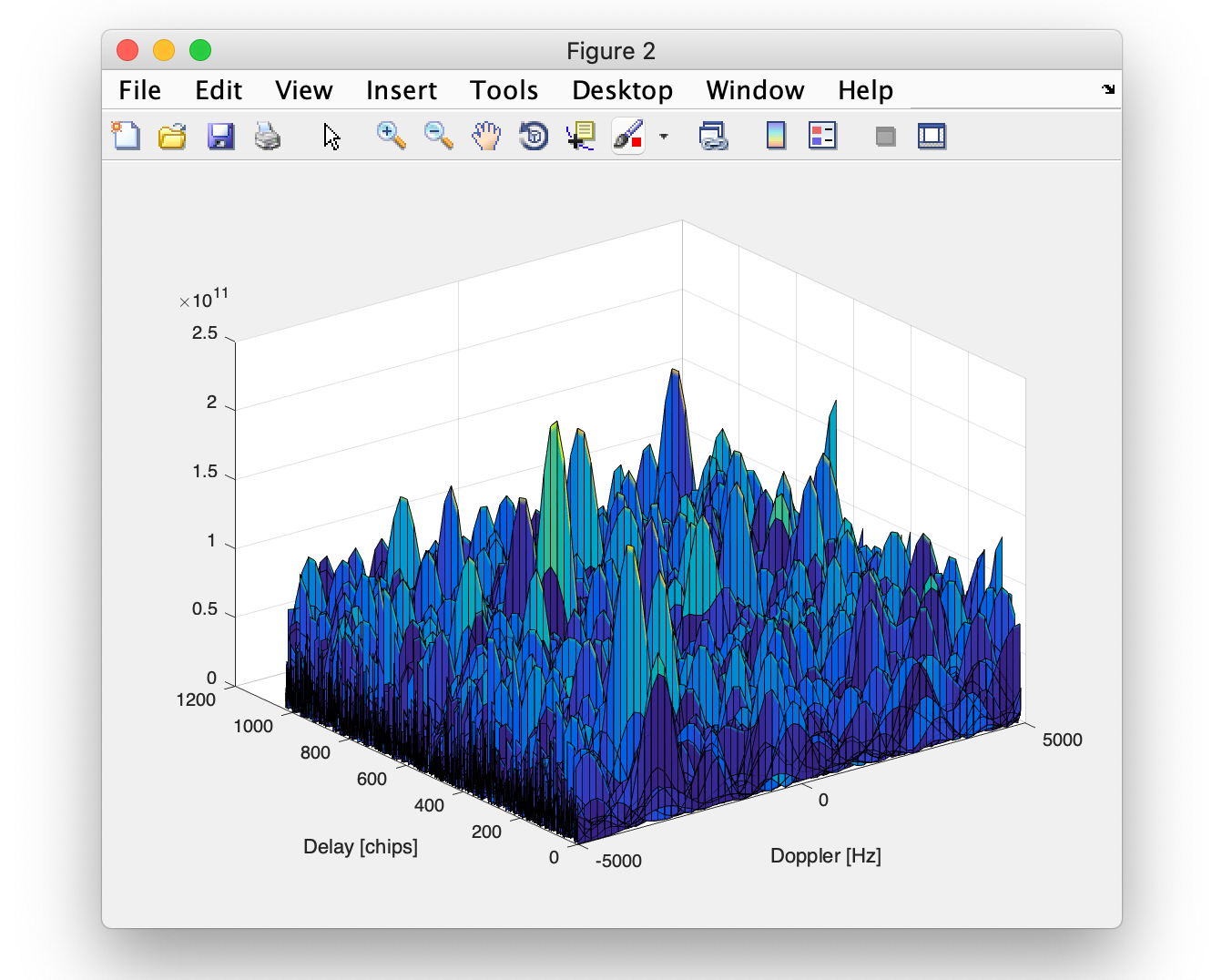 Negative acquisition.
Negative acquisition.
References
-
K. Borre, D. M. Akos, N. Bertelsen, P. Rinder, S. H. Jensen, A Software-Defined GPS and Galileo Receiver. A Single-Frequency Approach, 1st edition, Boston: Birkhäuser, November 2006. ↩
-
C. Fernández-Prades, J. Arribas, L. Esteve-Elfau, D. Pubill, P. Closas, An Open Source Galileo E1 Software Receiver, in Proceedings of the 6th ESA Workshop on Satellite Navigation Technologies (NAVITEC 2012), 5-7 December 2012, ESTEC, Noordwijk, The Netherlands. ↩ ↩2
-
P. S. Tong, A Suboptimum Synchronization Procedure for Pseudo Noise Communication Systems, in Proc. of National Telecommunications Conference, pp. 26D1-26D5. Atlanta, GA, Nov. 1973. ↩ ↩2
-
European GNSS (Galileo) Open Service Signal In Space Interface Control Document, Issue 2.1, Nov. 2023. ↩
-
J. Zhang, E. S. Lohan, Galileo E1 and E5a Link-Level Performances in Single and Multipath Channels. In G. Giambene, C. Sacchi, Eds., Personal Satellite Services, Third International ICST Conference PSATS 2011, Málaga, Spain, February 2011. ↩