Monitoring the internal status of the software receiver
Introduction
This guide assumes that GNSS-SDR and its software dependencies are already installed on your system, otherwise please check out the building guide and the README.md file for more details on how to install GNSS-SDR.
Since the introduction of the Monitor block, GNSS-SDR offers a mechanism for monitoring the status of the software receiver in real-time by providing access to 25 internal parameters that tell us about the performance of each channel. The complete list of parameters is documented here.
In this article, we are going to learn how to create a minimal monitoring client application written in C/C++ that will print and update the PRN, CN0, and Doppler frequency shift for each channel on a terminal window while the receiver is running with the Monitor block activated.
The Monitor block implements this mechanism using the binary serialization format provided by Protocol Buffers and defined in the gnss_synchro.proto file. The networking functions are taken from the Boost.Asio library.
The following diagram can help us to better understand how this block works.
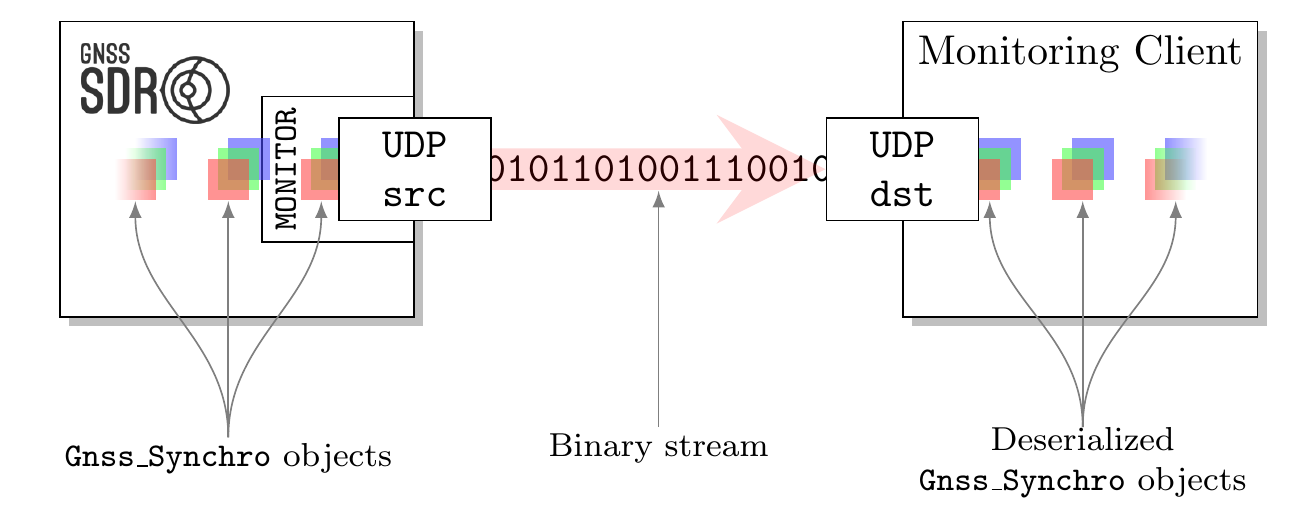
The colored boxes represent Gnss_Synchro objects moving across the receiver chain. These objects are special containers that hold a set of variables that capture the internal state of the receiver. Each color represents a different channel. When these objects reach the PVT block, they are consumed. Therefore they are not visible from the outside, as they do not exit the receiver. This is where the Monitor block comes into play. Its purpose is to stream these objects to the outside world using a binary serialization format. This stream is sent over UDP from a source port to a destination port that can either be on the same machine or on a different one.
Finally, at the other end, the monitoring client deserializes the Gnss_Synchro objects from the binary stream. Then we can access their member variables and use them for implementing our monitoring logic. In this exercise, we will simply print some of these parameters on the terminal using Protocol Buffers.
Building a minimal monitoring client application
Install dependencies
Copy and paste the following line in a terminal:
$ sudo apt install build-essential cmake libboost-dev libboost-system-dev \
libprotobuf-dev protobuf-compiler libncurses5-dev libncursesw5-dev wget
This will install the GCC/g++ compiler, the CMake build system, and the library dependencies: Protocol Buffers, Boost, and ncurses.
Download the required files
Create a new directory in the home folder for storing all the source files of our project:
$ mkdir monitoring-client
$ cd monitoring-client
Use the following command to download the gnss_synchro.proto file from the GNSS-SDR GitHub repository into the project folder:
$ wget https://raw.githubusercontent.com/gnss-sdr/gnss-sdr/next/docs/protobuf/gnss_synchro.proto
Create the deserializer class
Open your IDE or text editor of choice, create a new class and call it Gnss_Synchro_Udp_Source. This class will be in charge of deserializing the Gnss_Synchro objects from the UDP stream.
Define the class header file first: gnss_synchro_udp_source.h
#ifndef GNSS_SYNCHRO_UDP_SOURCE_H
#define GNSS_SYNCHRO_UDP_SOURCE_H
#include <boost/asio.hpp>
#include "gnss_synchro.pb.h" // This file is created automatically
// by the Protocol Buffers compiler
class Gnss_Synchro_Udp_Source
{
public:
Gnss_Synchro_Udp_Source(const unsigned short port);
bool read_gnss_synchro(gnss_sdr::Observables& stocks);
void populate_channels(gnss_sdr::Observables& stocks);
bool print_table();
private:
boost::asio::io_service io_service;
boost::asio::ip::udp::socket socket;
boost::system::error_code error;
boost::asio::ip::udp::endpoint endpoint;
gnss_sdr::Observables stocks;
std::map<int, gnss_sdr::GnssSynchro> channels;
};
#endif // GNSS_SYNCHRO_UDP_SOURCE_H
We are going to use 6 member variables:
| Variable Name | Description |
|---|---|
io_service |
Abstraction of the operating system interfaces. (See io_service). |
socket |
The UDP socket. (See ip::udp::socket). |
error |
Operating system-specific errors. (See boost::system::error_code). |
endpoint |
Endpoint that will be associated with the UDP socket. (See ip::udp::endpoint). |
stocks |
Object of the class gnss_sdr::Observables, which is a collection of gnss_sdr::GnssSynchro objects received from the socket. |
channels |
Map container of gnss_sdr::GnssSynchro objects indexed by their channel_id. |
and 4 member functions:
| Function Name | Description |
|---|---|
Gnss_Synchro_Udp_Source |
Constructor. Opens and binds the socket to the endpoint. |
read_gnss_synchro |
Fills the stocks collection with the latest deserialized gnss_sdr::GnssSynchro objects. |
populate_channels |
This function inserts the latest gnss_sdr::GnssSynchro objects from the stocks collection into the channels map container. |
print_table |
Prints the contents of the channels map in a table on the terminal screen. |
Now let’s go ahead and write the functions in the implementation file: gnss_synchro_udp_source.cc
First, add the include block:
#include "gnss_synchro_udp_source.h"
#include "gnss_synchro.pb.h"
#include <sstream>
#include <ncurses.h>
Next, implement the constructor. Open the socket and bind it to the endpoint:
Gnss_Synchro_Udp_Source::Gnss_Synchro_Udp_Source(const unsigned short port) :
socket{io_service},
endpoint{boost::asio::ip::udp::v4(), port}
{
socket.open(endpoint.protocol(), error); // Open socket.
socket.bind(endpoint, error); // Bind the socket to the given local endpoint.
}
Now let’s implement the read_gnss_synchro function. We need to create a buffer of memory and pass it to the receive function. Since this function is synchronous, the program execution will stop here waiting for incoming data. Once some data is received, the socket stores it in the buffer. The bytes variable keeps track of the received number of bytes. We use this information to extract the binary data from the memory buffer into a string of ones and zeros. After some intermediate steps, we end up deserializing the archived data (a collection of GnssSynchro objects) and save it in the stocks variable.
bool Gnss_Synchro_Udp_Source::read_gnss_synchro(gnss_sdr::Observables& stocks)
{
char buff[1500]; // Buffer for storing the received data.
// This call will block until one or more bytes of data has been received.
int bytes = socket.receive(boost::asio::buffer(buff));
std::string data(&buff[0], bytes);
// Deserialize a stock of Gnss_Synchro objects from the binary string.
return stocks.ParseFromString(data);
}
The implementation of populate_channels is straightforward. The function receives a collection of GnssSynchro annotations as a parameter and inserts each of them into the channels map container based on the channel_id. We only allow objects with a sampling frequency different from zero into the map container.
void Gnss_Synchro_Udp_Source::populate_channels(gnss_sdr::Observables& stocks)
{
for (std::size_t i = 0; i < stocks.observable_size(); i++)
{
gnss_sdr::GnssSynchro ch = stocks.observable(i);
if (ch.fs() != 0) // Channel is valid.
{
channels[ch.channel_id()] = ch;
}
}
}
Lastly, the print_table function calls the read_gnss_synchro and populate_channels functions, and prints a text table with the printw function from ncurses.
bool Gnss_Synchro_Udp_Source::print_table()
{
if (read_gnss_synchro(stocks))
{
populate_channels(stocks);
clear(); // Clear the screen.
// Print table header.
attron(A_REVERSE);
printw("%3s%6s%14s%17s\n", "CH", "PRN", "CN0 [dB-Hz]", "Doppler [Hz]");
attroff(A_REVERSE);
// Print table contents.
for (auto const& ch : channels)
{
int channel_id = ch.first; // Key
gnss_sdr::GnssSynchro data = ch.second; // Value
printw("%3d%6d%14f%17f\n", channel_id, data.prn(), data.cn0_db_hz(), data.carrier_doppler_hz());
}
refresh(); // Update the screen.
}
else
{
return false;
}
return true;
}
The complete implementation file should look like this:
#include "gnss_synchro_udp_source.h"
#include "gnss_synchro.pb.h"
#include <sstream>
#include <ncurses.h>
Gnss_Synchro_Udp_Source::Gnss_Synchro_Udp_Source(const unsigned short port) :
socket{io_service},
endpoint{boost::asio::ip::udp::v4(), port}
{
socket.open(endpoint.protocol(), error); // Open socket.
socket.bind(endpoint, error); // Bind the socket to the given local endpoint.
}
bool Gnss_Synchro_Udp_Source::read_gnss_synchro(gnss_sdr::Observables& stocks)
{
char buff[1500]; // Buffer for storing the received data.
// This call will block until one or more bytes of data has been received.
int bytes = socket.receive(boost::asio::buffer(buff));
std::string data(&buff[0], bytes);
// Deserialize a stock of Gnss_Synchro objects from the binary string.
return stocks.ParseFromString(data);
}
void Gnss_Synchro_Udp_Source::populate_channels(gnss_sdr::Observables& stocks)
{
for (std::size_t i = 0; i < stocks.observable_size(); i++)
{
gnss_sdr::GnssSynchro ch = stocks.observable(i);
if (ch.fs() != 0) // Channel is valid.
{
channels[ch.channel_id()] = ch;
}
}
}
bool Gnss_Synchro_Udp_Source::print_table()
{
if (read_gnss_synchro(stocks))
{
populate_channels(stocks);
clear(); // Clear the screen.
// Print table header.
attron(A_REVERSE);
printw("%3s%6s%14s%17s\n", "CH", "PRN", "CN0 [dB-Hz]", "Doppler [Hz]");
attroff(A_REVERSE);
// Print table contents.
for (auto const& ch : channels)
{
int channel_id = ch.first; // Key
gnss_sdr::GnssSynchro data = ch.second; // Value
printw("%3d%6d%14f%17f\n", channel_id, data.prn(), data.cn0_db_hz(), data.carrier_doppler_hz());
}
refresh(); // Update the screen.
}
else
{
return false;
}
return true;
}
Create the main function
Create a new file and implement the main function: main.cc
#include "gnss_synchro_udp_source.h"
#include <boost/lexical_cast.hpp>
#include <iostream>
#include <chrono>
#include <thread>
#include <ncurses.h>
int main(int argc, char* argv[])
{
try
{
// Check command line arguments.
if (argc != 2)
{
// Print help.
std::cerr << "Usage: monitoring-client <port>\n";
return 1;
}
unsigned short port = boost::lexical_cast<unsigned short>(argv[1]);
Gnss_Synchro_Udp_Source udp_source(port);
initscr(); // Initialize ncurses.
printw("Listening on port %d UDP...\n", port);
refresh(); // Update the screen.
while (true)
{
udp_source.print_table();
}
}
catch (std::exception& e)
{
std::cerr << e.what() << '\n';
}
return 0;
}
Build the source code
Create the CMakeLists.txt file. This file contains a set of directives and instructions describing the project’s source files and targets.
cmake_minimum_required (VERSION 3.9)
project (monitoring-client CXX)
set(CMAKE_CXX_STANDARD 11)
set(Boost_USE_STATIC_LIBS OFF)
find_package(Boost COMPONENTS system REQUIRED)
set(CURSES_NEED_NCURSES TRUE)
find_package(Curses REQUIRED)
find_package(Protobuf REQUIRED)
if(${Protobuf_VERSION} VERSION_LESS "3.0.0")
message(FATAL_ERROR "Fatal error: Protocol Buffers >= v3.0.0 required.")
endif()
protobuf_generate_cpp(PROTO_SRCS PROTO_HDRS ${CMAKE_SOURCE_DIR}/gnss_synchro.proto)
add_library(monitoring_lib ${CMAKE_SOURCE_DIR}/gnss_synchro_udp_source.cc ${PROTO_SRCS})
target_link_libraries(monitoring_lib
PUBLIC
Boost::boost
Boost::system
${CURSES_LIBRARIES}
protobuf::libprotobuf
pthread
)
target_include_directories(monitoring_lib
PUBLIC
${CURSES_INCLUDE_DIRS}
${CMAKE_BINARY_DIR}
)
add_executable(monitoring-client ${CMAKE_SOURCE_DIR}/main.cc)
target_link_libraries(monitoring-client PUBLIC monitoring_lib)
Save it in the project folder alongside the project source files.
Next, create a build folder inside the project folder:
$ mkdir build
We can make use of the tree command to list the contents of our project folder in a tree-like format. This is how it should look at this stage:
$ tree
.
├── build
├── CMakeLists.txt
├── gnss_synchro.proto
├── gnss_synchro_udp_source.cc
├── gnss_synchro_udp_source.h
└── main.cc
1 directory, 5 files
Finally, go ahead and build the source code:
$ cd build
$ cmake ../
$ make
The monitoring-client executable will be created in the build folder. Try running it with no arguments. It should print the usage help:
$ ./monitoring-client
Usage: monitoring-client <port>
Our monitoring client is ready. We have completed the first half of this tutorial. Now let’s go ahead and configure the receiver.
Leave the terminal window open, as we will come back to it later, and switch to a new terminal window.
Activation of the Monitor block in the software receiver
In order to run the receiver, we are going to use the same signal source file that is used in the first position fix tutorial.
It is convenient to store the signal file and the receiver configuration in a separate directory from the project folder. Create a work directory in your home folder:
$ cd ~
$ mkdir work
$ cd work
Download the file containing the GNSS raw signal samples. This can be done directly from the terminal:
$ wget https://sourceforge.net/projects/gnss-sdr/files/data/2013_04_04_GNSS_SIGNAL_at_CTTC_SPAIN.tar.gz
$ tar -zxvf 2013_04_04_GNSS_SIGNAL_at_CTTC_SPAIN.tar.gz
Copy the configuration file, paste it in a text editor and add the following fragment at the end of the configuration file to activate the Monitor block:
;######### MONITOR CONFIG ############
Monitor.enable_monitor=true
Monitor.decimator_factor=50
Monitor.client_addresses=127.0.0.1
Monitor.udp_port=1234
We will stream the receiver internal parameters to the localhost address on port 1234 UDP with a decimation rate of 50. GNSS observations are delivered each 20 ms, so this will provide status updates once a second.
The complete configuration file should look like this:
[GNSS-SDR]
;######### GLOBAL OPTIONS ##################
GNSS-SDR.internal_fs_sps=2000000
;######### SIGNAL_SOURCE CONFIG ############
SignalSource.implementation=File_Signal_Source
SignalSource.filename=/home/your-username/work/data/2013_04_04_GNSS_SIGNAL_at_CTTC_SPAIN.dat
SignalSource.item_type=ishort
SignalSource.sampling_frequency=4000000
SignalSource.samples=0
;######### SIGNAL_CONDITIONER CONFIG ############
SignalConditioner.implementation=Signal_Conditioner
;######### DATA_TYPE_ADAPTER CONFIG ############
DataTypeAdapter.implementation=Ishort_To_Complex
;######### INPUT_FILTER CONFIG ############
InputFilter.implementation=Pass_Through
InputFilter.item_type=gr_complex
;######### RESAMPLER CONFIG ############
Resampler.implementation=Direct_Resampler
Resampler.sample_freq_in=4000000
Resampler.sample_freq_out=2000000
Resampler.item_type=gr_complex
;######### CHANNELS GLOBAL CONFIG ############
Channels_1C.count=8
Channels.in_acquisition=1
Channel.signal=1C
;######### ACQUISITION GLOBAL CONFIG ############
Acquisition_1C.implementation=GPS_L1_CA_PCPS_Acquisition
Acquisition_1C.item_type=gr_complex
Acquisition_1C.threshold=0.008
Acquisition_1C.doppler_max=10000
Acquisition_1C.doppler_step=250
;######### TRACKING GLOBAL CONFIG ############
Tracking_1C.implementation=GPS_L1_CA_DLL_PLL_Tracking
Tracking_1C.item_type=gr_complex
Tracking_1C.pll_bw_hz=40.0;
Tracking_1C.dll_bw_hz=4.0;
;######### TELEMETRY DECODER GPS CONFIG ############
TelemetryDecoder_1C.implementation=GPS_L1_CA_Telemetry_Decoder
;######### OBSERVABLES CONFIG ############
Observables.implementation=Hybrid_Observables
;######### PVT CONFIG ############
PVT.implementation=RTKLIB_PVT
PVT.averaging_depth=100
PVT.flag_averaging=true
PVT.output_rate_ms=10
PVT.display_rate_ms=500
;######### MONITOR CONFIG ############
Monitor.enable_monitor=true
Monitor.decimator_factor=50
Monitor.client_addresses=127.0.0.1
Monitor.udp_port=1234
Please do not forget to point SignalSource.filename to the actual path of your data file.
Testing the monitoring client
We are now ready to test our application. Switch back to the other terminal window and start the monitoring client on port 1234:
$ ./monitoring-client 1234
You will see this message printed on the screen:
Listening on port 1234 UDP...
Now start the receiver on the other terminal window:
$ gnss-sdr -c ./my-first-GNSS-SDR-receiver.conf
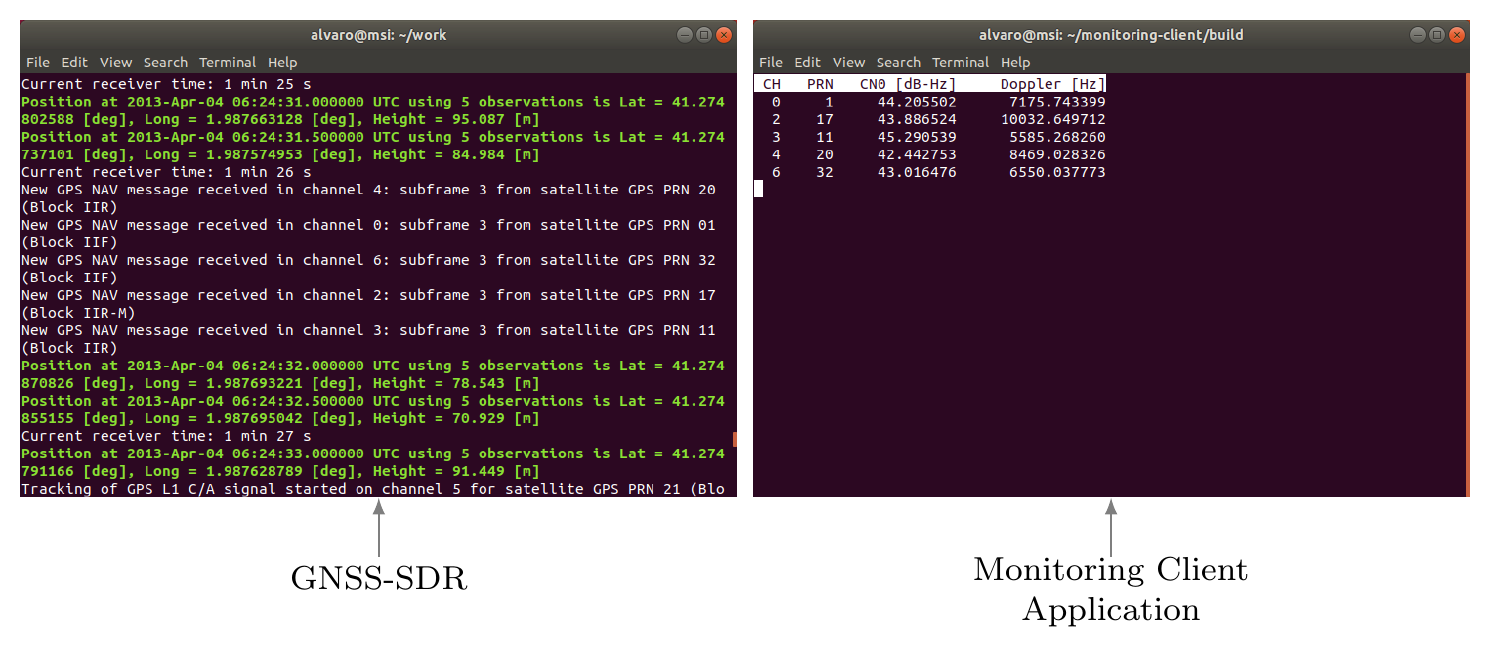
If all worked fine you should see a table like this:
CH PRN CN0 [dB-Hz] Doppler [Hz]
0 1 44.205502 7175.743399
2 17 43.886524 10032.649712
3 11 45.290539 5585.268260
4 20 42.442753 8469.028326
6 32 43.016476 6550.037773
If you see something similar to this… Yay! You are successfully monitoring the internals of your open source software-defined GPS receiver!