Build and install GNSS-SDR
This page describes several ways to build and install GNSS-SDR.

Installing everything through software package managers
GNU/Linux distributions based on Debian
Starting from Debian 9 and Ubuntu 16.04, you can install GNSS-SDR just by doing:
$ sudo apt install gnss-sdr
However, even on very recent distributions, the latest packaged GNSS-SDR version is often at least months behind the latest developments, and the same applies to its dependencies. In order to get access to the most recent features and bug fixes, you might want to build the software from the source code.
The good part: This is the easiest and fastest way to get GNSS-SDR installed in your system. Just a single line in your terminal will do all the work for you.
The downside: GNSS-SDR package updates need to undergo an acceptance process before they are included in the different distributions, so it might not be the ultimate version of the source code. The same applies to dependency libraries.
If everything went fine, you can directly jump into how to get your first position fix. If your Operating System release still does not include the GNSS-SDR package, you can build it from source.
macOS using Macports
If you are using macOS 12 Monterey or above, and the Macports package manager, GNSS-SDR can be installed by typing in a Terminal:
$ sudo port install gnss-sdr
This will install the latest stable release of GNSS-SDR.
You have another option here!
Instead of installing the latest stable release, you
can install the code found on the next branch, which might contain some bug
fixes and new features with respect to the latest stable release:
$ sudo port install gnss-sdr-devel
If everything went fine, you can directly jump into how to get your first position fix. Or maybe you might prefer other options, such as using Homebrew instead of Macports as a software package manager, or building the source code manually. For more details of GNSS-SDR on macOS, please check the README.md file.
Building from source
Is it better to compile from source or to install from a package? Here we provide some guidelines. The rule of thumb is: Always consider installing from standard packages of your Operating System first; only compile from sources if you know exactly why you need to do that.
GNSS-SDR and its software dependencies can all be installed either by
downloading their source code, building and installing them in your system, or
by installing the corresponding software package. Under GNU/Linux, the package
manager may vary according to the distribution you are using (.deb for
Debian-based distros, such as Ubuntu, Linaro and Raspbian; .rpm for Fedora /
SUSE / Mandriva; etc.). In Mac OS X, the most popular open-source package
managers are Macports and Homebrew. In all cases, a possible option for a quick
jump into GNSS-SDR is to install all the dependencies from packages, and then
building GNSS-SDR from the source code.
But maybe this approach does not fit your needs. Maybe you already have some dependency already built from source and want to use it, or your setup requires some specific flag somewhere. This is a building-time vs. fine-tuning trade-off. In order to take the adequate approach, just remember this basic rule:
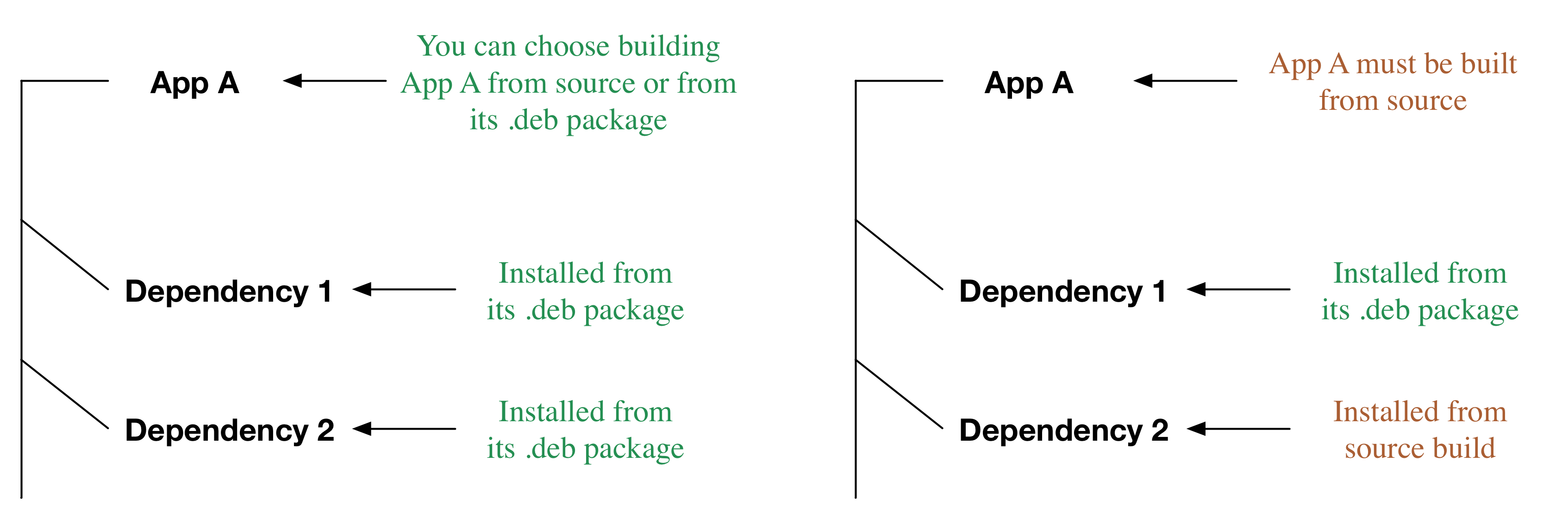 Software packages require that all their dependencies must be also installed from packages.
Software packages require that all their dependencies must be also installed from packages.
and take into account the following considerations:
The good part: The advantage of compiling from source is that you can compile packages with certain flags/options which may be missing or disabled in standard packages. Also, it makes it easy to have multiple versions of the same program installed. Also, you can choose an exact version of a package that may be already removed from, or not yet present in, your OS repositories.
The downside: The disadvantage of compiling from source is that the usual
cmake .. && make && sudo make install procedure keeps your package manager
completely unaware of the changes you are making, so you are not going to get
automatic updates for the manually-compiled software, and it is possible
that package manager will later override/break your package if you are not
careful to install it in a separate location.
Some highly automated tools that can do some of the work for you are described below.
Install dependencies
Install all dependencies using packages
If you are using Debian or Ubuntu, you can install the required dependencies by running the following commands in a terminal:
$ sudo apt update
$ sudo apt build-dep gnss-sdr
The build-dep option tells apt to install all the dependencies required
to build gnss-sdr from source for your specific distribution. This does not
install gnss-sdr itself, only its dependencies.
If you are building the software from the next branch of the upstream repository,
please check the README.md
file to see if any new dependencies have been added or if others have been removed
since the version packaged in your distribution.
Once you have installed these packages, you can jump directly to clone, build and install GNSS-SDR.
For other distributions (e.g. Arch Linux, Fedora, openSUSE, Rocky Linux) please check the list of dependency packages in the README.md file.
Install dependencies manually
This option is adequate if you are interested in development, in working with the most recent versions of software dependencies, want more fine-tuning on the installed versions, or simply in building everything from the scratch just for the fun of it. Please check how to manually build GNSS-SDR dependencies.
Clone, build, and install GNSS-SDR
Once all the dependencies are installed in your system, you are ready to clone the repository, build the source code and install the software in your system:
$ git clone https://github.com/gnss-sdr/gnss-sdr
$ cd gnss-sdr
$ git checkout next
$ mkdir -p build && cd build
$ cmake ..
$ make
$ sudo make install
The step git checkout next is optional, and sets the source tree pointing to
the next branch, which is the most recent development snapshot. If this step
is omitted it takes the main branch by default, which contains the latest
stable release, and maybe some bug fixes.
In addition, CMake accepts a number of configuration options for your building process. For instance, if you want to compile your source in “Debug” mode instead of the default “Release”, you can type:
$ cmake -DCMAKE_BUILD_TYPE=Debug ..
and then CMake will add the debug flags appropriate for your compiler. There are more options that can be of your interest, such as the addition of extra drivers for RF front-ends not included by default, implementations of signal processing blocks that take advantage of your GPU, addition of experimental features, the building of optional QA code, and so on. Check out the available building configuration options documentation for more details.
If everything went fine in the building process, now you can jump into how to get your first position fix.
Alternative tools
Using Ninja
Ninja is a small build system with a focus on speed,
that can be seen as a replacement for make. If the parameter -GNinja is
passed to CMake, it generates a build.ninja file (instead of a Makefile)
that is used by the Ninja build system to compile and link the source code.
Thus, after cloning the repository, the build workflow is:
$ cd gnss-sdr
$ git checkout next
$ mkdir -p build && cd build
$ cmake -GNinja ..
$ ninja
$ sudo ninja install
In general, the compilation time when using Ninja is comparable to that when using Make for a full build, although its performance is quite platform dependent. Ninja is specially targeted to improve performance in large projects and for incremental builds, so it seems to be a good replacement for Make especially for developers who need to often recompile the source code. In Debian-based GNU/Linux distributions, it can be installed by doing:
$ sudo apt install ninja-build
On macOS, Ninja can be installed using Macports:
$ sudo port install ninja
or Homebrew:
$ brew install ninja
More information about Ninja usage can be found in the Ninja Manual.
Using Clang
Clang is a compiler front end for C, C++ and other programming languages. It uses LLVM as its back end, and it is designed to be able to replace the full GNU Compiler Collection (GCC). Under macOS, this compiler is used by default. In GNU/Linux, it can be used to build GNSS-SDR in replacement of GCC.
In Debian/Ubuntu-based distributions, Clang can be installed by doing:
$ sudo apt install clang
Other packages specifying the Clang version, such as clang-3.4, clang-3.8,
clang-4.0, clang-5.0, …, or clang-19 could exist for your distribution,
check its documentation. Once installed, its use can be configured by passing
the following parameters to CMake:
$ cmake -DCMAKE_CXX_COMPILER=/usr/bin/clang++-19 -DCMAKE_C_COMPILER=/usr/bin/clang-19 ..
of course replacing 19 by the actual version installed in your machine. Some
distributions drop the version number, so you may just have /usr/bin/clang++
and /usr/bin/clang.
If you have the Ninja build system installed, you can build GNSS-SDR replacing
GCC and make by Clang and Ninja:
$ cmake -DCMAKE_CXX_COMPILER=/usr/bin/clang++-19 -DCMAKE_C_COMPILER=/usr/bin/clang-19 -GNinja ..
Using Xcode
Xcode is an integrated development environment (IDE) for macOS containing a suite of software development tools developed by Apple.
In order to build GNSS-SDR with Xcode, pass the following parameter to CMake:
$ cmake -GXcode ..
This will create a gnss-sdr.xcodeproj project that can be opened by Xcode (in
the top bar menu, click File Open
… open the gnss-sdr.xcodeproj
project).
You can also build from the command line:
$ xcodebuild
or
$ xcodebuild -config Release
Other builds
Snap package
Snaps are Linux packages aimed for Ubuntu or Ubuntu-like distros. Snaps are self-contained packages that bundle the application and all the libraries and runtimes it needs, and can be updated and reverted without affecting the rest of the system. Snaps are confined from the OS and other apps through security mechanisms, but can exchange content and functions with other snaps.
Visit https://github.com/carlesfernandez/snapcraft-sandbox for instructions on building your own snap package of GNSS-SDR, or install it directly from the Snap Store:

Docker
Docker is an open-source tool designed to make it easier to create, deploy, and run applications by using containers. Docker containers wrap a piece of software in a complete filesystem that contains everything needed to run: code, runtime, system tools and system libraries, and ship it all out as one package. This guarantees that the software will always run the same, regardless of any customized settings that the executing machine might have that could differ from the machine used for writing and testing the code. Using containers is another way of packing applications, in a much lighter weight and with a much faster delivery model than using Virtual Machines.
Releases of Docker images with GNSS-SDR already installed are available from the Docker Hub.
-
An image based on Ubuntu with dependencies installed via .deb packages
$ docker run -it carlesfernandez/docker-gnsssdrThe latest built from GNSS-SDR’s
nextbranch can be pulled as:$ docker pull carlesfernandez/docker-gnsssdr:latest
Visit https://hub.docker.com/r/carlesfernandez/docker-gnsssdr for further instructions (how to share folders within the host machine and the Docker image, how to set the graphical environment, etc.).
GNSS-SDR in embedded platforms
We provide a Software Development Kit (SDK) based on OpenEmbedded for cross-compiling GNSS-SDR in your desktop computer, producing executables that can run in embedded platforms, such as a Zedboard or a Raspberry Pi 3. OpenEmbedded offers a best-in-class cross-compile environment, allowing developers to create a complete, custom GNU/Linux distribution for embedded systems.
Visit Cross-compiling GNSS-SDR for instructions on cross-compiling GNSS-SDR for embedded systems.