First positioning fix using Galileo
The GNSS-SDR developer team is happy to announce that the software is able to obtain Galileo-only, real-time position fixes with the available signals of the four Galileo satellites already in orbit.
The hardware setup was composed of a GNSS active antenna located at the rooftop of the CTTC headquarters building, connected to a USRP1 + DBSRX2 daughterboard front-end. The GNSS-SDR software was executed in an Intel Core 2 Quad CPU PC running Ubuntu 12.04 LTS 32 bits. Since four satellites are not enough for providing global coverage, we waited until the four satellites were visible at the same time from our location to perform the experiment.
If you wish to try, obtain an executable built from the latest revision of the source code repository, go to the install folder, and type:
$ gnss-sdr --config_file=../conf/gnss-sdr_Galileo_E1.conf
to post-process a raw data file (there is a sample file here), or configure the .conf file to process data from your RF front-end if you want to obtain PVT fixes in real-time.
The results of the processing are shown below. Fig. 1 shows a Google Earth snapshot of the obtained KML file, after processing 100 seconds of signal. Some details of the processing output log are listed as follows:
CH 0: Satellite Galileo PRN 20 (Block IOV), CN0 = 41.391 [dB-Hz]
CH 2: Satellite Galileo PRN 11 (Block IOV), CN0 = 35.6473 [dB-Hz]
CH 1: Satellite Galileo PRN 12 (Block IOV), CN0 = 40.639 [dB-Hz]
CH 3: Satellite Galileo PRN 19 (Block IOV), CN0 = 41.3673 [dB-Hz]
Position at 2013-Nov-10 03:52:14 is Lat = 41.27473002206516 [deg],
Long = 1.987675232634192 [deg], Height= 62.46116237901151 [m]
Dilution of Precision at 2013-Nov-10 15:52:14 is HDOP = 3.58641436755431
VDOP = 4.151352135926544 TDOP = 4.650305636312183
GDOP = 5.485990573475482
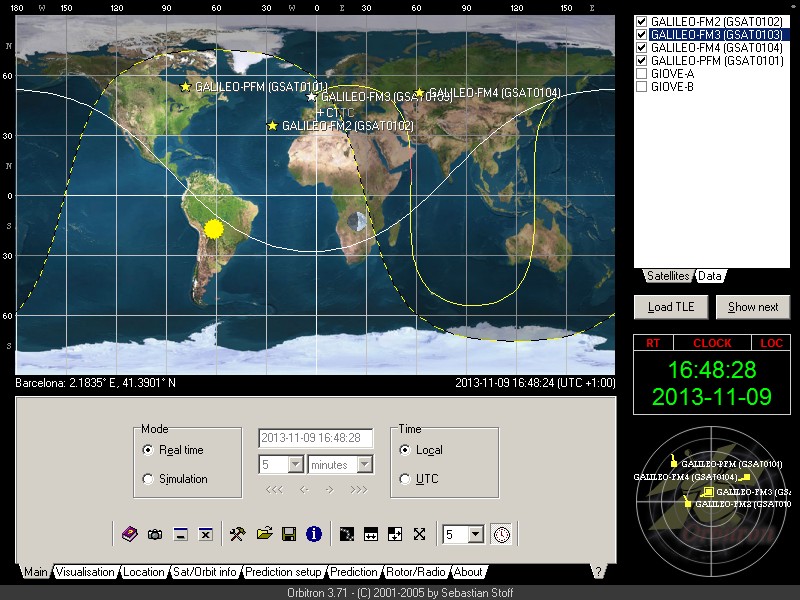
The maximum available Carrier-to-Noise density ratio (CN0) was 41 dB-Hz, associated with high elevation satellites (such as Galileo FM3), as predicted by the orbital model. In contrast, Galileo PFM (PRN ID 11) is visible with a low elevation, and thus the received CN0 was 35 dB-Hz. The next figure shows a capture of the predicted satellite positions and the sky plot.
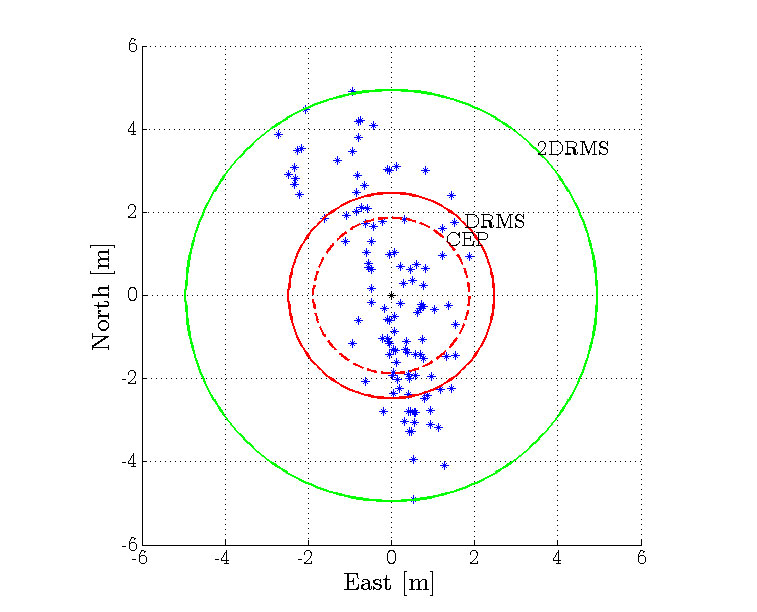
We evaluated the receiver performance in this experiment using standard positioning precision measurements, represented with position scatter plots and their corresponding statistic confidence regions. Two of the most commonly used confidence measurements for positioning are the Distance Root Mean Square (DRMS) and the Circular Error Probability (CEP), for 2D positioning, and the Mean Radial Spherical Error (MRSE) when measures are expressed in 3D. GNSS-SDR exhibits a CEP precision of 1.9 m and a DRMS precision of 2.5 m, shown below:
The 3D analysis reveals a precision MRSE of 3.4 m, results shown below:
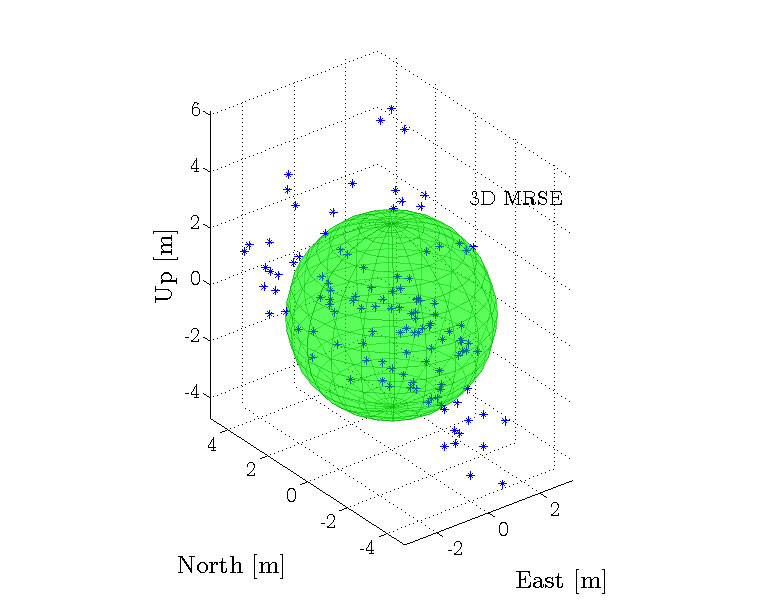
The minimal available Galileo constellation of four satellites provided a Dilution of Precision (DOP) with horizontal and vertical values of 3.6 and 4.2, respectively. The precision performance obtained by GNSS-SDR, which computed the PVT solution by a simple least-squares algorithm and without any sort of external help, has clearly passed the first test!

If you are interested in replicating the experiments and playing with the software receiver, we suggest the use of a tool such as GPredict for predicting the time window in which the four satellites will be visible from your location. Happy satellite hunting!
Update: This position fix was acknowledged by the European Space Agency as one of the first 50 users of the Galileo system:

Leave a comment