11.- Repeatability
Repeatability is related to the spread of a measure, also referred to as precision. It refers to how close a position solution is to the mean of all the obtained solutions, in a static location scenario.
The difference between accuracy and precision is shown below:
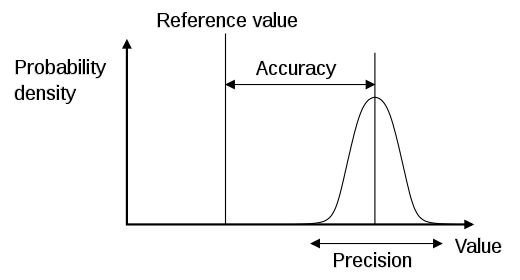 Although the two words precision and accuracy can be synonymous in colloquial
use, they are deliberately contrasted in the context of the scientific method.
Source: Wikipedia.
Although the two words precision and accuracy can be synonymous in colloquial
use, they are deliberately contrasted in the context of the scientific method.
Source: Wikipedia.
The most common precision metrics are defined below:
| Measure | Formula | Confidence region probability |
|---|---|---|
| 2D 2DRMS | \(2\sqrt{\sigma_E^2+\sigma_N^2}\) | 95 % |
| 2D DRMS | \(\sqrt{\sigma_E^2+\sigma_N^2}\) | 65 % |
| 2D CEP | \(0.62\sigma_N+0.56\sigma_E\), if \(\frac{\sigma_N}{\sigma_E}>0.3\) | 50 % |
| 3D 99 % SAS | \(1.122 \left(\sigma_E^2+\sigma_N^2+\sigma_U^2\right)\) | 99 % |
| 3D 90 % SAS | \(0.833 \left(\sigma_E^2+\sigma_N^2+\sigma_U^2\right)\) | 90 % |
| 3D MRSE | \(\sqrt{\sigma_E^2+\sigma_N^2+\sigma_U^2}\) | 61 % |
| 3D SEP | \(0.51 \left(\sigma_E^2+\sigma_N^2+\sigma_U^2\right)\) | 50 % |
which are the same expressions as those defined for accuracy, but now the standard deviations are not referred to a reference value but to the mean of the obtained results:
\[\begin{equation} \sigma_{E}^{(precision)} = \sqrt{\frac{1}{L-1}\sum_{l=1}^L \left(E[l] - \hat{E}\right)^2}~, \end{equation}\]where \(\hat{E}=\frac{1}{L}\sum_{l=1}^{L}E[l]\) is the mean of all the \(E\) coordinates of the obtained positioning solutions, \(E[l]\) are the East coordinates of the obtained positioning solutions, and \(L\) is the number of available position fixes. Similar expressions can be defined for the North and Up coordinates:
\[\begin{equation} \sigma_{N}^{(precision)} = \sqrt{\frac{1}{L-1}\sum_{l=1}^L \left(N[l] - \hat{N}\right)^2}~, \end{equation}\]where \(\hat{N}=\frac{1}{L}\sum_{l=1}^{L}N[l]\), and
\[\begin{equation} \sigma_{U}^{(precision)} = \sqrt{\frac{1}{L-1}\sum_{l=1}^L \left(U[l] - \hat{U}\right)^2}~, \end{equation}\]where \(\hat{U}=\frac{1}{L}\sum_{l=1}^{L}U[l]\).
Example:
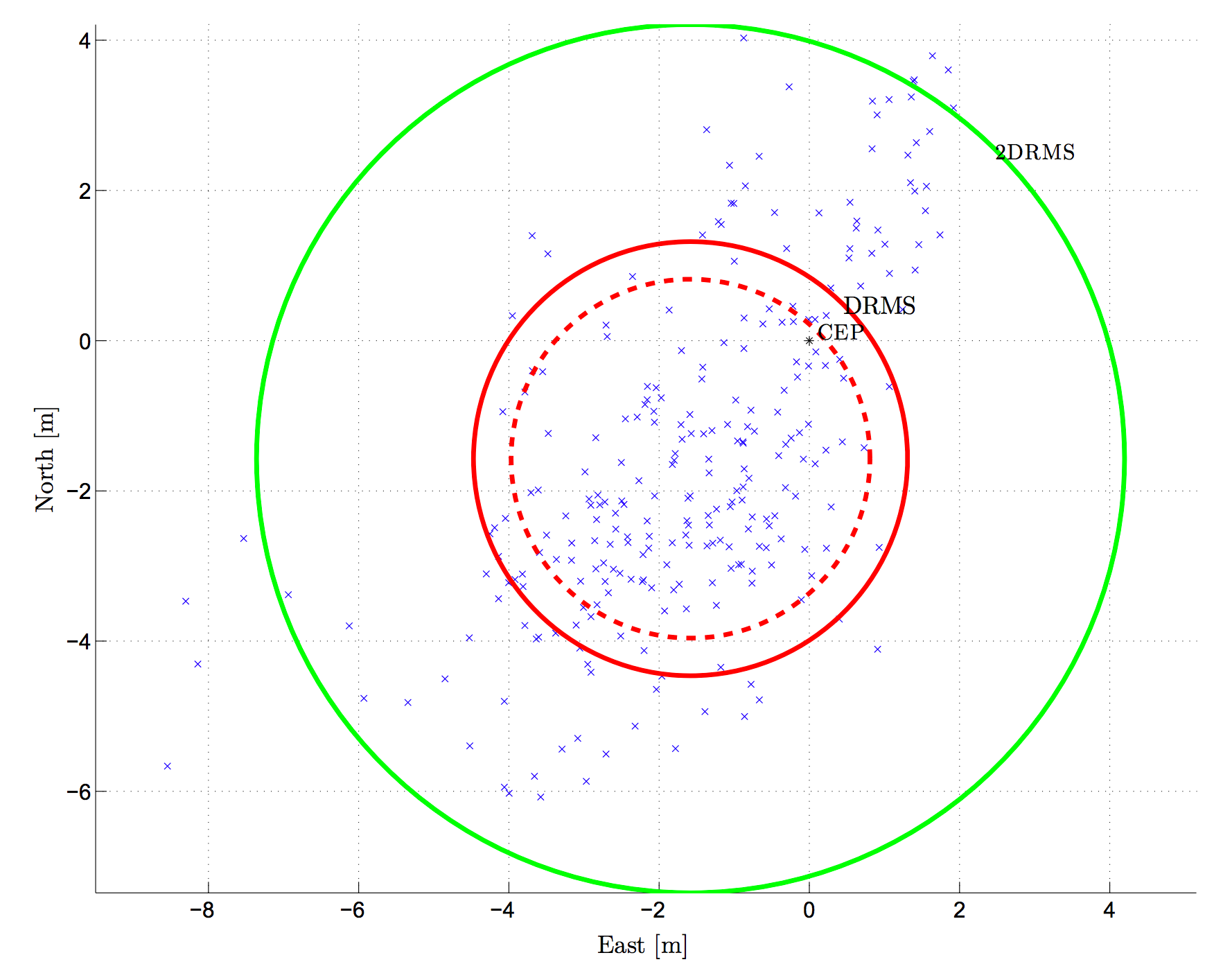 2D position scatter plot and the circles containing 50%, 65%, and 95% of
position fixes (corresponding to the CEP, DRMS, and 2DRMS precision errors,
respectively)1.
2D position scatter plot and the circles containing 50%, 65%, and 95% of
position fixes (corresponding to the CEP, DRMS, and 2DRMS precision errors,
respectively)1.
Indicators of Repeatability
It follows a list of possible repeatability indicators for a software-defined GNSS receiver:
- Stand-alone receiver’s static positioning precision.
- Differential GNSS static positioning precision.
- Average convergence times to sub-metric precision.
References
-
C. Fernández-Prades, J. Arribas and P. Closas, Turning a Television into a GNSS Receiver, in Proc. of the 26th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2013), Nashville, TN, Sep. 2013, pp. 1492 - 1507. ↩

Leave a comment