Geniux (GNSS-SDR for Embedded GNU/Linux) is a customized GNU/Linux distribution for developing and running GNSS-SDR on embedded devices, based on the Yocto Project. This Operating System includes a specific set of popular tools, libraries, and device drivers tailored for supporting an extended range of Software Defined Radio applications, helping to bring them to production-ready deployments with an approach widely adopted throughout the embedded/IoT industry.
The Geniux distribution comes in different version names, following those of the Yocto Project, being Rocko the oldest supported version. Each version name is tagged with a timestamp, so Geniux versions can evolve in time, but tagged versions can be reproduced at any time in the future. In addition, each version and each time tag can be built for a particular board or machine. This is expressed in the figure below:
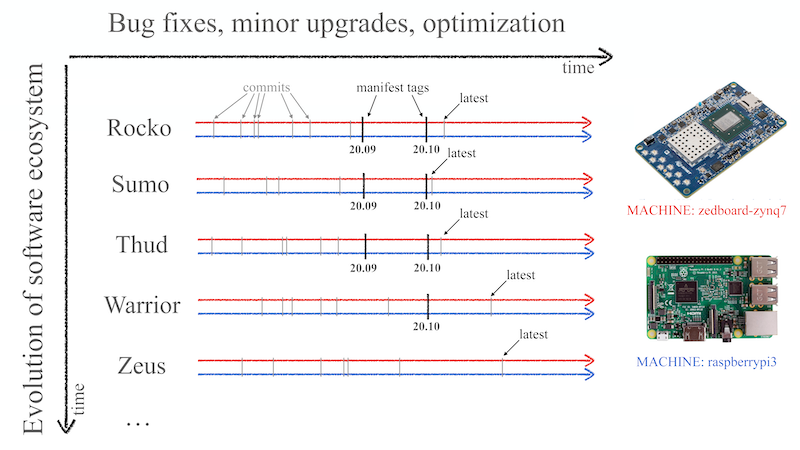 Geniux keeps the pace of the software ecosystem evolution, but older versions
are still reproducible. Virtualization technology allows reproducing images
regardless of the software stack running at the host system building it.
Geniux keeps the pace of the software ecosystem evolution, but older versions
are still reproducible. Virtualization technology allows reproducing images
regardless of the software stack running at the host system building it.
Those names (Rocko, Sumo, Thud, Warrior, Zeus, etc.) represent major Geniux
versions. Then, each named version can have time tags (in the figure above,
20.09 and 20.10). All versions have a latest tag pointing to the latest
commit. Each named version with a time tag can be built for different
boards or machines (in the figure above, zedboard-zynq7 and rasperrypi3).
Version naming
The Geniux distribution follows the versioning format
VERSION_NAME-MANIFEST_DATE.CONF_NUMBER, where:
- VERSION_NAME follows those of the Yocto Project
releases.
rocko,sumo,thud,warrior,zeus,dunfell,gatesgarth,hardknott,honister,kirkstone,langdale,mickledore,nanbield.
- MANIFEST_DATE follows the tag names at
https://github.com/carlesfernandez/oe-gnss-sdr-manifest.
The time tag
latestalways exists for each version name, and points to the latest release.20.09,21.02, …,21.08,22.02,22.06,23.04,24.02,latest.
- CONF_NUMBER: minor version number.
0,1, …
Example of version name: rocko-24.02.0.
Generating Geniux images for a specific version, time tag, and machine
The generation of images and SDKs for a given Geniux version, time tag, and machine in a virtualized environment is automated by the yocto-geniux repository. With Docker already installed and running on your system, clone the Git repository and go to its base path:
$ git clone https://github.com/carlesfernandez/yocto-geniux
$ cd yocto-geniux
Now you are ready to build Geniux images for the release you want with a single
command, by using the geniux-builder.sh script. Taking a look at its help
message:
$ ./geniux-builder.sh --help
You should get:
This script builds and stores Geniux images.
Usage:
./geniux-builder.sh [version] [manifest] [machine] (--image-only / -i)
Options:
version Geniux version (from oldest to most recent):
rocko, sumo, thud, warrior, zeus, dunfell, gatesgarth,
hardknott, honister, kirkstone, langdale, mickledore, nanbield. Default: dunfell
Check available branches at https://github.com/carlesfernandez/meta-gnss-sdr
manifest Geniux version manifest: 21.02, 21.08, 22.02, 22.06, 23.04, 24.04, latest. Default: latest
Dated manifests available at https://github.com/carlesfernandez/oe-gnss-sdr-manifest/tags
machine Specify your (list of) MACHINE here. By default, zedboard-zynq7 and raspberrypi3 are built.
If more than one, surround it with quotes, e.g.: "raspberrypi4-64 intel-corei7-64"
--image-only / -i (optional) Build the image but do not execute the container.
Environment variables that affect behavior:
GENIUX_MIRROR_PATH Base path to local mirror. Only used if set.
e.g.: 'export GENIUX_MIRROR_PATH=/home/carlesfernandez/mirror'
The mirror is expected to be at '$GENIUX_MIRROR_PATH/sources/$version'
GENIUX_STORE_PATH Path in which products will be stored. Only used if set.
e.g.: 'export GENIUX_STORE_PATH=/home/carlesfernandez/geniux-releases'
GENIUX_STORE_REQUIRES_SUDO If set, the script will ask for super-user privileges to write in the store.
You will be asked only once at the beginning. The password will not be revealed.
e.g.: 'export GENIUX_STORE_REQUIRES_SUDO=1'
You can find specific examples of how to use this script below. For more advanced usage modes (e.g., an interactive mode that allows you to make changes and experiment), check the instructions here.
The building process takes several hours and requires a powerful host system
with at least 120 GB of free space in the hard disk and 32 GB of RAM. When
finished, you will get your products in the output/ folder (or wherever the
GENIUX_STORE_PATH environment variable points to). Among others:
- gnss-sdr-demo-image: an image containing gnss-sdr, ready to go. It defines the “root” and “geniux” users, both with default password “geniux”.
- gnss-sdr-dev-image: a development image with everything required for gnss-sdr, but without gnss-sdr. You can cross-compile the binary and copy it to the target filesystem. No password.
- Starting from Zeus v21.08,
wic.xzandwic.bmapimage files ready to de deployed on an SD card. - gnss-sdr-dev-docker: a Docker development image archive file for the target architecture.
- A script that installs a software development kit (SDK) for cross-compiling.
Please note that if the automated building process fails for some reason
(failing network connection, misconfiguration, disappeared source repositories,
shortage of free hard disk space, RAM memory or CPU resources, etc.) before it
finishes, the running container will be deleted and you will lose everything, so
you will need to start over again. For a safer procedure, you can use the
interactive
mode
of the Docker image, which allows you to make changes, retry after a failure,
build other images, and save your products to /home/geniux/yocto/output/ when
done, so outside the Docker container. The container itself will be deleted at
exit.
Main features
Geniux Rocko 24.02.0
- Operating System based on the Yocto Project version 2.4.4.
- It brings, among many others, the following software packages:
- Development tools: Automake v1.15.1, CMake v3.8.2, GCC v7.3.0 (+ libgfortran), make v4.2.1, ninja v1.7.2, Python v2.7.14 and v3.5.3.
- Goodies for signal processing:
- GNSS-SDR v0.0.19.
- SDR framework: GNU Radio v3.7.13.
- Number crunching libraries: Armadillo v10.8.0, FFTW v3.3.6, Lapack v3.7.0, VOLK v1.4.0.
- C++ supporting libraries: Boost v1.64.0, gflags v2.2.2, glog v0.5.0, googletest v1.12.1, Matio v1.5.23, Protocol Buffers v3.4.1, Pugixml v1.11.4.
- Graphical representation: Gnuplot v5.0.5.
- Additional Python modules (e.g., Scipy, Matplotlib) can be installed
with
pip3.
- Software drivers and tools for RF front-ends: UHD v3.10.2.0 (+ gr-uhd), gr-osmosdr v0.1.4.1 (+ rtl-sdr, airspy, hackrf, and rfspace), gr-iio v0.3, libiio v2019_R1, libad9361-iio v2019_R1, iio-oscilloscope v2019_R1.
- It can be built for machines defined by the
meta-xilinx-bsp,meta-raspberrypi,meta-intel, andopenembedded-core/metalayers. - The
meta-gnss-sdrlayer is compatible with Xilinx PetaLinux Tools v2018.3.
Examples on how to generate images and the SDK using the yocto-geniux repo:
$ ./geniux-builder.sh rocko 24.02 zedboard-zynq7
$ ./geniux-builder.sh rocko 24.02 zcu102-zynqmp
$ ./geniux-builder.sh rocko 24.02 raspberrypi3
$ ./geniux-builder.sh rocko 24.02 intel-corei7-64
$ ./geniux-builder.sh rocko 24.02 qemuarm
You can replace 24.02 by latest in order to get the latest developments.
Geniux Sumo 24.02.0
- Operating System based on the Yocto Project version 2.5.3.
- It brings, among many others, the following software packages:
- Development tools: Automake v1.15.1, CMake v3.10.3, GCC v7.3.0 (+ libgfortran), make v4.2.1, ninja v1.8.2, Python v2.7.15 and v3.5.5.
- Goodies for signal processing:
- GNSS-SDR v0.0.19.
- SDR framework: GNU Radio v3.7.13.5.
- Number crunching libraries: Armadillo v10.8.0, FFTW v3.3.7, Lapack v3.7.0, VOLK v1.5.0.
- C++ supporting libraries: Boost v1.66.0, gflags v2.2.2, glog v0.5.0, googletest v1.12.0, Matio v1.5.23, Protocol Buffers v3.5.1, Pugixml v1.11.4.
- Graphical representation: Gnuplot v5.2.2.
- Additional Python modules (e.g., Scipy, Matplotlib) can be installed
with
pip3.
- Software drivers and tools for RF front-ends: gr-osmosdr v0.1.4.1 (+ rtl-sdr and hackrf), gr-iio v0.3, libiio v2019_R1, libad9361-iio v2019_R1, iio-oscilloscope v2019_R1.
- It can be built for machines defined by the
meta-xilinx-bsp,meta-raspberrypi,meta-intel, andopenembedded-core/metalayers.
Examples on how to generate images and the SDK using the yocto-geniux repo:
$ ./geniux-builder.sh sumo 24.02 zedboard-zynq7
$ ./geniux-builder.sh sumo 24.02 raspberrypi3
$ ./geniux-builder.sh sumo 24.02 intel-corei7-64
$ ./geniux-builder.sh sumo 24.02 qemuarm64
You can replace 24.02 by latest in order to get the latest developments.
Geniux Thud 24.02.0
- Operating System based on the Yocto Project version 2.6.4.
- It brings, among many others, the following software packages:
- Development tools: Automake v1.16.1, CMake v3.12.2, GCC v8.2.0 (+ libgfortran), make v4.2.1, ninja v1.8.2, Python v2.7.16 and v3.5.6.
- Goodies for signal processing:
- GNSS-SDR v0.0.19.
- SDR framework: GNU Radio v3.7.14.0.
- Number crunching libraries: Armadillo v10.8.0, FFTW v3.3.8, Lapack v3.7.0, VOLK v2.2.1.
- C++ supporting libraries: Boost v1.64.0, gflags v2.2.2, glog v0.5.0, googletest v1.12.0, Matio v1.5.23, Protocol Buffers v3.6.1, Pugixml v1.11.4.
- Graphical representation: gnss-sdr-monitor v1.0, Gnuplot v5.2.2.
- Additional Python modules (e.g., Scipy, Matplotlib) can be installed
with
pip3.
- Software drivers and tools for RF front-ends: UHD v3.13.0.1 (+ gr-uhd), libiio v2019_R2, libad9361-iio v2019_R2, iio-oscilloscope v2019_R2.
- It can be built for machines defined by the
meta-xilinx-bsp,meta-raspberrypi,meta-intel, andopenembedded-core/metalayers.- The
meta-xilinxlayer points to therel-v2019.2branch.
- The
- The
meta-gnss-sdrlayer is compatible with Xilinx PetaLinux Tools v2019.2.
Examples on how to generate images and the SDK using the yocto-geniux repo:
$ ./geniux-builder.sh thud 24.02 zedboard-zynq7
$ ./geniux-builder.sh thud 24.02 zcu102-zynqmp
$ ./geniux-builder.sh thud 24.02 raspberrypi3
$ ./geniux-builder.sh thud 24.02 intel-corei7-64
$ ./geniux-builder.sh thud 24.02 qemuarm64
You can replace 24.02 by latest in order to get the latest developments.
Geniux Warrior 24.02.0
- Operating System based on the Yocto Project version 2.7.4.
- It brings, among many others, the following software packages:
- Development tools: Automake v1.16.1, CMake v3.14.1, GCC v8.3.0 (+ libgfortran), make v4.2.1, ninja v1.9.0, Python v2.7.18 and v3.7.7.
- Goodies for signal processing:
- GNSS-SDR v0.0.19.
- SDR framework: GNU Radio v3.8.2.0.
- Number crunching libraries: Armadillo v10.8.0, FFTW v3.3.9, Lapack v3.7.0, VOLK v2.3.0.
- C++ supporting libraries: Boost v1.69.0, gflags v2.2.2, glog v0.5.0, googletest v1.12.0, Matio v1.5.23, Protocol Buffers v3.6.1, Pugixml v1.11.4.
- Graphical representation: gnss-sdr-monitor v1.0, Gnuplot v5.2.2.
- Additional Python modules (e.g., Scipy, Matplotlib) can be installed
with
pip3.
- Software drivers and tools for RF front-ends: UHD v3.15.LTS (+ gr-uhd), gr-osmosdr v0.2.3 (+ rtl-sdr and hackrf), gr-iio v0.3, libiio v0.23, libad9361-iio v0.2, iio-oscilloscope v0.14.
- It can be built for machines defined by the
meta-xilinx-bsp,meta-raspberrypi,meta-intel, andopenembedded-core/metalayers.
Examples on how to generate images and the SDK using the yocto-geniux repo:
$ ./geniux-builder.sh warrior 24.02 zedboard-zynq7
$ ./geniux-builder.sh warrior 24.02 raspberrypi4-64
$ ./geniux-builder.sh warrior 24.02 intel-corei7-64
$ ./geniux-builder.sh warrior 24.02 qemuarm64
You can replace 24.02 by latest in order to get the latest developments.
Geniux Zeus 24.02.0
- Operating System based on the Yocto Project version 3.0.4.
- It brings, among many others, the following software packages:
- Development tools: Automake v1.16.1, CMake v3.15.3, GCC v9.2.0 (+ libgfortran), make v4.2.1, ninja v1.9.0, Python v2.7.18 and v3.7.8.
- Goodies for signal processing:
- GNSS-SDR v0.0.19.
- SDR framework: GNU Radio v3.8.2.0.
- Number crunching libraries: Armadillo v10.8.0, FFTW v3.3.9, Lapack v3.7.0, VOLK v2.3.0.
- C++ supporting libraries: Boost v1.71.0, gflags v2.2.2, glog v0.5.0, googletest v1.12.0, Matio v1.5.23, Protocol Buffers v3.9.2, Pugixml v1.11.4.
- Graphical representation: gnss-sdr-monitor v1.0, Gnuplot v5.2.2, Matplotlib v3.1.1.
- Additional Python modules (e.g., Scipy) can be installed with
pip3.
- Software drivers and tools for RF front-ends: UHD v3.15.LTS (+ gr-uhd), gr-osmosdr v0.2.3 (+ rtl-sdr and hackrf), gr-iio v0.3, libiio v0.23, libad9361-iio v0.2, iio-oscilloscope v0.14.
- It can be built for machines defined by the
meta-xilinx-bsp,meta-raspberrypi,meta-intel, andopenembedded-core/metalayers.- The
meta-xilinxlayer points torel-v2020.3branch.
- The
Examples on how to generate images and the SDK using the yocto-geniux repo:
$ ./geniux-builder.sh zeus 24.02 zedboard-zynq7
$ ./geniux-builder.sh zeus 24.02 raspberrypi4-64
$ ./geniux-builder.sh zeus 24.02 intel-skylake-64
$ ./geniux-builder.sh zeus 24.02 qemuarm64
You can replace 24.02 by latest in order to get the latest developments.
Geniux Dunfell 24.02.0
- Operating System based on the Yocto Project version 3.1.31 LTS.
- It brings, among many others, the following software packages:
- Development tools: Automake v1.16.1, CMake v3.16.5, GCC v9.5.0 (+ libgfortran), make v4.3, ninja v1.10.0, Python v3.8.12.
- Goodies for signal processing:
- GNSS-SDR v0.0.19.
- SDR framework: GNU Radio v3.8.5.0.
- Number crunching libraries: Armadillo v10.8.0, FFTW v3.3.9, Lapack v3.7.0, VOLK v2.4.1.
- C++ supporting libraries: Boost v1.72.0, gflags v2.2.2, glog v0.5.0, googletest v1.12.1, Matio v1.5.23, Protocol Buffers v3.11.4, Pugixml v1.11.4.
- Graphical representation: gnss-sdr-monitor v1.0, Gnuplot v5.2.8, Matplotlib v3.2.1.
- Additional Python modules (e.g., Scipy) can be installed with
pip3.
- Software drivers and tools for RF front-ends: UHD v3.15.LTS (+ gr-uhd), gr-osmosdr v0.2.3 (+ rtl-sdr and hackrf), gr-iio v0.3, libiio v0.23, libad9361-iio v0.2, iio-oscilloscope v0.14.
- It can be built for machines defined by the
meta-xilinx-bsp,meta-raspberrypi,meta-intel, andopenembedded-core/metalayers.
Examples on how to generate images and the SDK using the yocto-geniux repo:
$ ./geniux-builder.sh dunfell 24.02 zedboard-zynq7
$ ./geniux-builder.sh dunfell 24.02 raspberrypi4-64
$ ./geniux-builder.sh dunfell 24.02 intel-corei7-64
$ ./geniux-builder.sh dunfell 24.02 qemuarm64
You can replace 24.02 by latest in order to get the latest developments.
Geniux Gatesgarth 24.02.0
- Operating System based on the Yocto Project version 3.2.4.
- It brings, among many others, the following software packages:
- Development tools: Automake v1.16.2, CMake v3.18.2, GCC v10.2.0 (+ libgfortran), make v4.3, ninja v1.10.1, Python v3.8.5.
- Goodies for signal processing:
- GNSS-SDR v0.0.19.
- SDR framework: GNU Radio v3.8.5.0.
- Number crunching libraries: Armadillo v10.8.0, FFTW v3.3.9, Lapack v3.9.0, VOLK v2.4.1.
- C++ supporting libraries: Boost v1.74.0, gflags v2.2.2, glog v0.5.0, googletest v1.12.1, Matio v1.5.23, Protocol Buffers v3.13.0, Pugixml v1.13.
- Graphical representation: gnss-sdr-monitor v1.0, Gnuplot v5.2.8, Matplotlib v3.3.2.
- Additional Python modules (e.g., Scipy) can be installed with
pip3.
- Software drivers and tools for RF front-ends: UHD v3.15.LTS (+ gr-uhd), gr-osmosdr v0.2.3 (+ rtl-sdr and hackrf), gr-iio v0.3, libiio v0.23, libad9361-iio v0.2, iio-oscilloscope v0.14.
- It can be built for machines defined by the
meta-xilinx-bsp,meta-raspberrypi,meta-intel, andopenembedded-core/metalayers.- The
meta-xilinxlayer points to therel-v2021.2branch. - Use
linux-xlnxkernel forzedboard-zynq7machine, based on Linux kernel 5.10. - The
meta-gnss-sdrlayer is compatible with Xilinx PetaLinux Tools v2021.2.
- The
Examples on how to generate images and the SDK using the yocto-geniux repo:
$ ./geniux-builder.sh gatesgarth 24.02 zedboard-zynq7
$ ./geniux-builder.sh gatesgarth 24.02 zc706-zynq7
$ ./geniux-builder.sh gatesgarth 24.02 raspberrypi4-64
$ ./geniux-builder.sh gatesgarth 24.02 intel-skylake-64
$ ./geniux-builder.sh gatesgarth 24.02 qemuarm64
You can replace 24.02 by latest in order to get the latest developments.
Geniux Hardknott 24.02.0
- Operating System based on the Yocto Project version 3.3.6.
- It brings, among many others, the following software packages:
- Development tools: Automake v1.16.3, CMake v3.19.5, GCC v10.3.0 (+ libgfortran), make v4.3, ninja v1.10.2, Python v3.9.9.
- Goodies for signal processing:
- GNSS-SDR v0.0.19.
- SDR framework: GNU Radio v3.8.0.
- Number crunching libraries: Armadillo v10.8.0, FFTW v3.3.9, Lapack v3.9.0, VOLK v2.5.0.
- C++ supporting libraries: Boost v1.75.0, gflags v2.2.2, glog v0.5.0, googletest v1.12.1, Matio v1.5.23, Protocol Buffers v3.15.2, Pugixml v1.13.
- Graphical representation: gnss-sdr-monitor v1.0, Gnuplot v5.2.8, Matplotlib v3.4.1.
- Additional Python modules (e.g., Scipy) can be installed with
pip3.
- Software drivers and tools for RF front-ends: UHD v3.15.LTS (+ gr-uhd), gr-osmosdr v0.2.3 (+ rtl-sdr and hackrf), gr-iio v0.3, libiio v0.23, libad9361-iio v0.2, iio-oscilloscope v0.14.
- It can be built for machines defined by the
meta-raspberrypi,meta-intel, andopenembedded-core/metalayers.
Examples on how to generate images and the SDK using the yocto-geniux repo:
$ ./geniux-builder.sh hardknott 24.02 intel-corei7-64
$ ./geniux-builder.sh hardknott 24.02 raspberrypi4-64
$ ./geniux-builder.sh hardknott 24.02 qemuarm64
You can replace 24.02 by latest in order to get the latest developments.
Geniux Honister 24.02.0
- Operating System based on the Yocto Project version 3.4.4.
- It brings, among many others, the following software packages:
- Development tools: Automake v1.16.3, CMake v3.21.1, GCC v11.2.0 (+ libgfortran), make v4.3, ninja v1.10.2, Python v3.9.9.
- Goodies for signal processing:
- GNSS-SDR v0.0.19.
- SDR framework: GNU Radio v3.10.2.
- Number crunching libraries: Armadillo v10.8.0, FFTW v3.3.9, Lapack v3.9.0, VOLK v2.5.1.
- C++ supporting libraries: Boost v1.77.0, gflags v2.2.2, glog v0.5.0, googletest v1.12.1, Matio v1.5.23, Protocol Buffers v3.18.0, Pugixml v1.13.
- Graphical representation: gnss-sdr-monitor v1.0, Gnuplot v5.4.1, Matplotlib v3.4.1.
- Additional Python modules (e.g., Scipy) can be installed with
pip3.
- Software drivers and tools for RF front-ends: UHD 4.3 (+ gr-uhd), gr-iio, gr-osmosdr v0.2.0 (+ rtl-sdr and hackrf), libiio v0.24, libad9361-iio v0.2, iio-oscilloscope v0.14.
- It can be built for machines defined by the
meta-xilinx-bsp,meta-xilinx-vendor,meta-raspberrypi,meta-intel, andopenembedded-core/metalayers.- The
meta-xilinxlayer points to therel-v2022.2branch.
- The
Examples on how to generate images and the SDK using the yocto-geniux repo:
$ ./geniux-builder.sh honister 24.02 intel-corei7-64
$ ./geniux-builder.sh honister 24.02 raspberrypi4-64
$ ./geniux-builder.sh honister 24.02 zedboard-zynq7
$ ./geniux-builder.sh honister 24.02 zc706-zynq7
$ ./geniux-builder.sh honister 24.02 zcu102-zynqmp
$ ./geniux-builder.sh honister 24.02 zcu208-zynqmp
You can replace 24.02 by latest in order to get the latest developments.
Geniux Kirkstone 24.02.0
- Operating System based on the Yocto Project version 4.0.16 LTS.
- It brings, among many others, the following software packages:
- Development tools: Automake v1.16.5, CMake v3.22.3, GCC v11.2.0 (+ libgfortran), make v4.3, ninja v1.10.2, Python v3.10.4.
- Goodies for signal processing:
- GNSS-SDR v0.0.19.
- SDR framework: GNU Radio v3.10.9.2
- Number crunching libraries: Armadillo v10.8.0, FFTW v3.3.9, Lapack v3.9.0, VOLK v2.5.2.
- C++ supporting libraries: Boost v1.77.0, gflags v2.2.2, glog v0.5.0, googletest v1.12.1, Matio v1.5.24, Protocol Buffers v3.19.4, Pugixml v1.13.
- Graphical representation: gnss-sdr-monitor v1.0, Gnuplot v5.4.3, Matplotlib v3.5.1.
- Additional Python modules (e.g., Scipy) can be installed with
pip3.
- Software drivers and tools for RF front-ends: UHD 4.3 (+ gr-uhd), gr-iio, gr-osmosdr v0.2.0 (+ rtl-sdr and hackrf), libiio v0.24, libad9361-iio v0.2, iio-oscilloscope v0.14.
- It can be built for machines defined by the
meta-raspberrypi,meta-intel, andopenembedded-core/metalayers.
Examples on how to generate images and the SDK using the yocto-geniux repo:
$ ./geniux-builder.sh kirkstone 24.02 intel-corei7-64
$ ./geniux-builder.sh kirkstone 24.02 raspberrypi4-64
You can replace 24.02 by latest in order to get the latest developments.
Geniux Langdale 24.02.0
- Operating System based on the Yocto Project version 4.1.4.
- It brings, among many others, the following software packages:
- Development tools: Automake v1.16.5, CMake v3.24.0, GCC v12.2.0 (+ libgfortran), make v4.3, ninja v1.11.1, Python v3.10.6.
- Goodies for signal processing:
- GNSS-SDR v0.0.19.
- SDR framework: GNU Radio v3.10.10.
- Number crunching libraries: Armadillo v10.8.0, FFTW v3.3.10, Lapack v3.10.1, VOLK v3.1.0.
- C++ supporting libraries: Boost v1.80.0, gflags v2.2.2, glog v0.5.0, googletest v1.12.1, Matio v1.5.26, Protocol Buffers v3.21.5, Pugixml v1.13.
- Graphical representation: gnss-sdr-monitor v1.0, Gnuplot v5.4.3, Matplotlib v3.5.3.
- Additional Python modules (e.g., Scipy) can be installed with
pip3.
- Software drivers and tools for RF front-ends: UHD 4.3 (+ gr-uhd), gr-iio, gr-osmosdr v0.2.0 (+ rtl-sdr and hackrf), libiio v0.23, libad9361-iio v0.2, iio-oscilloscope v0.14.
- It can be built for machines defined by the
meta-xilinx-bsp,meta-xilinx-vendor,meta-raspberrypi,meta-intel, andopenembedded-core/metalayers.
Examples on how to generate images and the SDK using the yocto-geniux repo:
$ ./geniux-builder.sh langdale 24.02 intel-corei7-64
$ ./geniux-builder.sh langdale 24.02 raspberrypi4-64
$ ./geniux-builder.sh langdale 24.02 zedboard-zynq7
$ ./geniux-builder.sh langdale 24.02 zcu208-zynqmp
You can replace 24.02 by latest in order to get the latest developments.
Geniux Mickledore 24.02.0
- Operating System based on the Yocto Project version 4.2.4.
- It brings, among many others, the following software packages:
- Development tools: Automake v1.16.5, CMake v3.25.2, GCC v12.3.0 (+ libgfortran), make v4.4.1, ninja v1.11.1, Python v3.11.5.
- Goodies for signal processing:
- GNSS-SDR v0.0.19.
- SDR framework: GNU Radio v3.10.10
- Number crunching libraries: Armadillo v10.8.0, FFTW v3.3.10, Lapack v3.10.1, VOLK v3.1.0.
- C++ supporting libraries: Boost v1.81.0, gflags v2.2.2, glog v0.5.0, googletest v1.12.1, Matio v1.5.26, Protocol Buffers v3.21.5, Pugixml v1.13.
- Graphical representation: Gnuplot v5.4.3, Matplotlib v3.5.3.
- Additional Python modules (e.g., Scipy) can be installed with
pip3.
- Software drivers and tools for RF front-ends: UHD 4.3 (+ gr-uhd), gr-iio, gr-osmosdr v0.2.0 (+ rtl-sdr and hackrf), libiio v0.24, libad9361-iio v0.2, iio-oscilloscope v0.14.
- It can be built for machines defined by the
meta-raspberrypi,meta-intel, andopenembedded-core/metalayers.
Examples on how to generate images and the SDK using the yocto-geniux repo:
$ ./geniux-builder.sh mickledore 24.02 intel-corei7-64
$ ./geniux-builder.sh mickledore 24.02 raspberrypi4-64
You can replace 24.02 by latest in order to get the latest developments.
Geniux Nanbield 24.02.0
- Operating System based on the Yocto Project version 4.2.4.
- It brings, among many others, the following software packages:
- Development tools: Automake v1.16.5, CMake v3.27.0, GCC v13.2.0 (+ libgfortran), make v4.4.1, ninja v1.11.1, Python v3.11.5.
- Goodies for signal processing:
- GNSS-SDR v0.0.19.
- SDR framework: GNU Radio v3.10.10
- Number crunching libraries: Armadillo v10.8.0, FFTW v3.3.10, Lapack v3.10.1, VOLK v3.1.0.
- C++ supporting libraries: Boost v1.83.0, gflags v2.2.2, glog v0.6.0, googletest v1.12.1, Matio v1.5.26, Protocol Buffers v3.23.5, Pugixml v1.14.
- Graphical representation: Gnuplot v5.4.3, Matplotlib v3.5.3.
- Additional Python modules (e.g., Scipy) can be installed with
pip3.
- Software drivers and tools for RF front-ends: UHD 4.6 (+ gr-uhd), gr-iio, gr-osmosdr v0.2.0 (+ rtl-sdr and hackrf), libiio v0.24, libad9361-iio v0.2, iio-oscilloscope v0.14.
- It can be built for machines defined by the
meta-raspberrypi,meta-intel, andopenembedded-core/metalayers.
Examples on how to generate images and the SDK using the yocto-geniux repo:
$ ./geniux-builder.sh nanbield 24.02 intel-corei7-64
$ ./geniux-builder.sh nanbield 24.02 raspberrypi4-64
You can replace 24.02 by latest in order to get the latest developments.
Flashing images on an SD card
Starting from Geniux Zeus 21.08, the geniux-builder.sh script produces .wic
images that can be flashed on an SD card and your device will be ready to go.
For image flashing, we recommend using a software tool such as Balena
Etcher. Just pick up the
gnss-sdr-demo-image-$MACHINE-yyyymmddHHMMSS.rootfs.wic.xz file, flash your SD
card, insert it in your device, and it will be ready to boot and run gnss-sdr.
Other flashing options here.
Key repositories
All the required information for building a Geniux release is contained in three public repositories:
- meta-gnss-sdr layer: Yocto layer defining all the packages in the Geniux
distribution, including the recipes for downloading and building them, their
cryptographic hash, the way to create customized full-system images.
- URL: https://github.com/carlesfernandez/meta-gnss-sdr
- Each Geniux version is defined in a different branch:
rocko,sumo,thud,warrior,zeus,dunfell,gatesgarth,hardknott,honister,kirkstone,langdale,mickledore,nanbield. Those branches are updated as we learn more about the Yocto Project usage, so they evolve in time.
- oe-gnss-sdr-manifest: Manifest containing the specific commits of all
the other Yocto layers required to build Geniux (notably,
openembedded-core,
meta-openembedded,
meta-qt5,
meta-sdr,
meta-xilinx,
meta-raspberrypi,
meta-intel, etc.).
- URL: https://github.com/carlesfernandez/oe-gnss-sdr-manifest
- Each Geniux version is defined in a different branch:
rocko,sumo,thud,warrior,zeus,dunfell,gatesgarth,hardknott,honister,kirkstone,langdale,mickledore,nanbield. - Tags: each tag corresponds to a version of the manifest in which the
meta-gnss-sdrhas been pinned to a specific commit. This allows fully-reproducible buildings in the future since it defines a fully-specified software system set. Examples:rocko-24.02,sumo-24.02,thud-24.02, etc. - In the above instructions, when
MANIFEST_DATEis set tolatest, all the layers are pinned to a specific commit but except themeta-gnss-sdrlayer, which points to whatever it is in the corresponding branch of that layer at that point of time.
- yocto-geniux: Tool for the virtualization and automation of the building process.
If you miss any feature on Geniux, or have an idea on how to make it better, pull requests and issues are welcome on those repositories. Their contents are released under the MIT License.
Disclaimer
Yocto Project and all related marks and logos are trademarks of The Linux Foundation. This website is not, in any way, endorsed by the Yocto Project or The Linux Foundation.
Enjoy Geniux!
]]>